四、识别和跟踪图像
本章的目标是将图像跟踪添加到 Second Sight。 我们将训练该应用以识别某些任意的矩形图像(例如绘画),并确定它们在 2D 投影中的姿势。 当该应用出现在相机源中时,它将在跟踪的图像周围绘制轮廓。 所有的跟踪和绘制都是使用 OpenCV 而不是其他 Android 库完成的。
注意
可以从作者的网站下载本章的完整 Eclipse 项目。 该项目有两个版本:
OpenCV 3.x 的版本位于这个页面。
位于这个页面的 OpenCV 2.x 版本。
将文件添加到项目
对于本章,我们需要添加一个新类com.nummist.secondsight.filters.ar.ImageDetectionFilter。 我们还需要添加一些资源文件,即我们要跟踪的图像。 从这个页面下载图像,将其解压缩,并将其放入项目的res/drawable-nodpi文件夹中。
这些图像是 19 世纪荷兰画家文森特·梵高和 16 世纪印度画家 Basawan。 我们的跟踪器可以很好地处理这些图像,因为它们包含许多高对比度的细节,而无需重复很多图案。 因此,是,可以在每个图像的大多数部分中进行跟踪。 例如,这是巴沙旺(Basawan)的一幅画作《阿克巴猎豹》:

这是文森特·梵高的画作之一《星空》:
了解图像跟踪
想象下面的对话:
A:我找不到《星空》的印刷品。 你知道在哪里吗?
B:看起来像什么?
对于计算机或对于西方艺术无知的人,B 的问题是很合理的。 在我们可以使用视感(或其他感官)来追踪某物之前,我们需要先感知到该物。 否则,我们至少需要对我们将要感知到的东西有一个很好的描述。 对于计算机视觉,我们必须提供参考图像,它将与实时摄像机图像或场景进行比较。 如果目标具有复杂的几何形状或运动部件,我们可能需要提供许多参考图像以说明不同的视角和姿势。 但是,对于使用著名绘画的示例,我们将假定目标是矩形且刚性的。
注意
Google 的按图像搜索是流行工具的示例,该工具要求用户提供参考图像。 如果您以前从未使用过它,请转到这个页面,单击相机图标,然后通过输入 URL 或上传文件来提供参考图像。 搜索结果应包括匹配或相似的图像。 该工具可以帮助想要验证图像原始来源的研究人员。
出于本章的目的,我们说跟踪的目的是确定如何在 3D 中放置矩形目标。 有了这些信息,我们就可以围绕目标绘制轮廓。 在最终的 2D 图像中,轮廓将为四边形。 (它不一定是矩形,因为目标可能会偏离相机。)
这种跟踪涉及四个主要步骤:
- 在参考图像和场景中找到特征。 从不同的距离或角度观察时,特征是可能保持相似外观的点。 例如,角点经常具有这种特性。 请参阅这个页面和这个页面。
- 为每组特征(参考和场景特征)找到描述符。 描述符是有关特征的数据向量。 某些功能不适合生成描述符,因此图像比特征具有更少的描述符。 参见这个页面。
- 查找两组描述符(参考和场景描述符)之间的匹配项。 如果我们将描述符想象为多维空间中的点,则根据点之间的距离度量来定义匹配。 彼此距离足够近的描述符被视为匹配项。 当一对描述符是匹配项时,我们也可以说基础特征对是匹配项。
- 在场景中的参考图像和匹配图像之间找到单应性。 单应性是一种 3D 变换,需要将两个投影的 2D 图像对齐(或尽可能靠近以对齐它们)。 它是基于两个图像的匹配特征点计算的。 通过将单应性应用于矩形,我们可以获得跟踪对象的轮廓。 参见这个页面。
有很多不同的技术可以执行前三个步骤。 OpenCV 提供了称为FeatureDetector,DescriptorExtractor和DescriptorMatcher分别支持几种技术。 我们将使用 OpenCV 称为FeatureDetector.ORB,DescriptorExtractor.ORB和DescriptorMatcher.BRUTEFORCE_HAMMINGLUT的技术组合。 这种组合是相对快速且鲁棒的。 与某些替代方案不同,它是缩放不变的和旋转不变的,这意味着可以在各种放大倍率,分辨率或距离下跟踪目标,并且从各个角度来看。 另外,与其他替代方案不同,它没有专利权,因此即使在商业应用中也可以免费使用。
注意
有关 ORB 的描述,其他技术及其相对优点,请参阅 Gil Levi 博客上二进制描述符的多部分教程。 作为该主题的先驱,另请参见描述符简介。
BahinIşık 和 KemalÖzkan 撰写的《对知名特征检测器和描述符的比较评估》是 ORB 及其替代品的另一个很好的来源。 可在这个页面上获得本文的电子版本。
最后,有关 OpenCV 中实现的 ORB 和替代方案的基准,请参阅 Ievgen Khvedchenya 的特征检测器和描述符提取器的博客文章。
在撰写本文时,OpenCV 的特征检测器仅支持灰度图像。 就我们的目的而言,此限制并不是很糟糕,因为用于灰度特征检测的算法比用于颜色特征检测的算法要快。 在移动设备上,我们必须进行节能以保持实时视频的合理速度,并且在每帧的灰度版本上运行计算机视觉功能是一种节能的方法。 但是,为了获得最佳结果,我们应确保选择的目标图像在转换为灰度时仍具有很强的对比度。
以下伪代码表示 OpenCV 中使用的标准灰度转换公式:
grayValue(r, g, b) = (0.299 * r) + (0.587 * g) + (0.114 * b)
前面的公式在保留蓝黄色对比度(其中黄色是红色加绿色)以及当然在黑白对比度方面最有效。 例如,此标准灰度转换在《星空》中保持对比度方面做得很好,该调色板具有主要由蓝色,黄色,黑色和白色组成的调色板。
编写图像跟踪过滤器
我们将把我们的跟踪器编写为在上一章中创建的Filter接口的实现。 追踪器的类别名称将为ImageDetectionFilter。 作为成员变量,此类具有FeatureDetector,DescriptorExtractor和DescriptorMatcher的实例,以及几个Mat实例,这些实例存储图像数据以及跟踪计算的中间或最终结果。 之所以存储其中一些结果,是因为它们在不同的帧之间不会改变。 之所以存储其他文件,是因为它比为每个帧重新创建Mat实例更有效。 类和成员变量的声明如下:
public class ImageDetectionFilter implements Filter {
// The reference image (this detector's target).
private final Mat mReferenceImage;
// Features of the reference image.
private final MatOfKeyPoint mReferenceKeypoints =
new MatOfKeyPoint();
// Descriptors of the reference image's features.
private final Mat mReferenceDescriptors = new Mat();
// The corner coordinates of the reference image, in pixels.
// CvType defines the color depth, number of channels, and
// channel layout in the image. Here, each point is represented
// by two 32-bit floats.
private final Mat mReferenceCorners =
new Mat(4, 1, CvType.CV_32FC2);
// Features of the scene (the current frame).
private final MatOfKeyPoint mSceneKeypoints =
new MatOfKeyPoint();
// Descriptors of the scene's features.
private final Mat mSceneDescriptors = new Mat();
// Tentative corner coordinates detected in the scene, in
// pixels.
private final Mat mCandidateSceneCorners =
new Mat(4, 1, CvType.CV_32FC2);
// Good corner coordinates detected in the scene, in pixels.
private final Mat mSceneCorners = new Mat(4, 1,
CvType.CV_32FC2);
// The good detected corner coordinates, in pixels, as integers.
private final MatOfPoint mIntSceneCorners = new MatOfPoint();
// A grayscale version of the scene.
private final Mat mGraySrc = new Mat();
// Tentative matches of scene features and reference features.
private final MatOfDMatch mMatches = new MatOfDMatch();
// A feature detector, which finds features in images.
private final FeatureDetector mFeatureDetector =
FeatureDetector.create(FeatureDetector.ORB);
// A descriptor extractor, which creates descriptors of
// features.
private final DescriptorExtractor mDescriptorExtractor =
DescriptorExtractor.create(DescriptorExtractor.ORB);
// A descriptor matcher, which matches features based on their
// descriptors.
private final DescriptorMatcher mDescriptorMatcher =
DescriptorMatcher.create(
DescriptorMatcher.BRUTEFORCE_HAMMINGLUT);
// The color of the outline drawn around the detected image.
private final Scalar mLineColor = new Scalar(0, 255, 0);
我们想要一种方便的方法来制作任意图像的图像跟踪器。 我们可以使用我们的应用将图像打包为可绘制资源,这些资源可以由任何 Android Context子类(例如Activity)加载。 因此,我们提供了一个构造器ImageDetectionFilter(final Context context, final int referenceImageResourceID),该构造器使用给定的Context和资源标识符加载参考图像。 图像的 RGBA 和灰度版本存储在成员变量中。 图像的角点也将被存储,其特征和描述符也将被存储。 构造器的代码如下:
public ImageDetectionFilter(final Context context,
final int referenceImageResourceID) throws IOException {
// Load the reference image from the app's resources.
// It is loaded in BGR (blue, green, red) format.
mReferenceImage = Utils.loadResource(context,
referenceImageResourceID,
Imgcodecs.CV_LOAD_IMAGE_COLOR);
// Create grayscale and RGBA versions of the reference image.
final Mat referenceImageGray = new Mat();
Imgproc.cvtColor(mReferenceImage, referenceImageGray,
Imgproc.COLOR_BGR2GRAY);
Imgproc.cvtColor(mReferenceImage, mReferenceImage,
Imgproc.COLOR_BGR2RGBA);
// Store the reference image's corner coordinates, in pixels.
mReferenceCorners.put(0, 0,
new double[] {0.0, 0.0});
mReferenceCorners.put(1, 0,
new double[] {referenceImageGray.cols(), 0.0});
mReferenceCorners.put(2, 0,
new double[] {referenceImageGray.cols(),
referenceImageGray.rows()});
mReferenceCorners.put(3, 0,
new double[] {0.0, referenceImageGray.rows()});
// Detect the reference features and compute their
// descriptors.
mFeatureDetector.detect(referenceImageGray,
mReferenceKeypoints);
mDescriptorExtractor.compute(referenceImageGray,
mReferenceKeypoints, mReferenceDescriptors);
}
提示
使代码适配 OpenCV 2.x
将Imgcodecs.CV_LOAD_IMAGE_COLOR替换为Highgui.CV_LOAD_IMAGE_COLOR。
回想一下Filter接口声明了一种方法apply(final Mat src, final Mat dst)。 我们对这种方法的实现将特征检测器,描述符提取器和描述符匹配器应用于源图像的灰度版本。 然后,我们调用帮助程序函数,该函数查找被跟踪目标的四个角(如果有),并绘制四边形轮廓。 代码如下:
@Override
public void apply(final Mat src, final Mat dst) {
// Convert the scene to grayscale.
Imgproc.cvtColor(src, mGraySrc, Imgproc.COLOR_RGBA2GRAY);
// Detect the scene features, compute their descriptors,
// and match the scene descriptors to reference descriptors.
mFeatureDetector.detect(mGraySrc, mSceneKeypoints);
mDescriptorExtractor.compute(mGraySrc, mSceneKeypoints,
mSceneDescriptors);
mDescriptorMatcher.match(mSceneDescriptors,
mReferenceDescriptors, mMatches);
// Attempt to find the target image's corners in the scene.
findSceneCorners();
// If the corners have been found, draw an outline around the
// target image.
// Else, draw a thumbnail of the target image. draw(src, dst);
}
findSceneCorners()辅助方法是一个更大的代码块,但是很多方法只是简单地遍历匹配项以汇编最佳列表。 如果所有匹配都非常差(如较大的距离值所示),则假定目标不在场景中,并且清除之前对其角点位置的任何估计。 如果比赛既不好也不好,我们假定目标在场景中的某个地方,但是我们保留其先前估计的角点位置。 此政策有助于我们稳定对角点位置的估计。 最后,如果匹配良好且至少有四个匹配项,我们找到单应性并使用它来更新估计的角点位置。
注意
有关查找单应性的数学描述,请参见官方 OpenCV 文档。
findSceneCorners()的实现如下:
private void findSceneCorners() {
List<DMatch> matchesList = mMatches.toList();
if (matchesList.size() < 4) {
// There are too few matches to find the homography.
return;
}
List<KeyPoint> referenceKeypointsList =
mReferenceKeypoints.toList();
List<KeyPoint> sceneKeypointsList =
mSceneKeypoints.toList();
// Calculate the max and min distances between keypoints.
double maxDist = 0.0;
double minDist = Double.MAX_VALUE;
for(DMatch match : matchesList) {
double dist = match.distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
// The thresholds for minDist are chosen subjectively
// based on testing. The unit is not related to pixel
// distances; it is related to the number of failed tests
// for similarity between the matched descriptors.
if (minDist > 50.0) {
// The target is completely lost.
// Discard any previously found corners.
mSceneCorners.create(0, 0, mSceneCorners.type());
return;
} else if (minDist > 25.0) {
// The target is lost but maybe it is still close.
// Keep any previously found corners.
return;
}
// Identify "good" keypoints based on match distance.
ArrayList<Point> goodReferencePointsList =
new ArrayList<Point>();
ArrayList<Point> goodScenePointsList =
new ArrayList<Point>();
double maxGoodMatchDist = 1.75 * minDist;
for(DMatch match : matchesList) {
if (match.distance < maxGoodMatchDist) {
goodReferencePointsList.add(
referenceKeypointsList.get(match.trainIdx).pt);
goodScenePointsList.add(
sceneKeypointsList.get(match.queryIdx).pt);
}
}
if (goodReferencePointsList.size() < 4 ||
goodScenePointsList.size() < 4) {
// There are too few good points to find the homography.
return;
}
// There are enough good points to find the homography.
// (Otherwise, the method would have already returned.)
// Convert the matched points to MatOfPoint2f format, as
// required by the Calib3d.findHomography function.
MatOfPoint2f goodReferencePoints = new MatOfPoint2f();
goodReferencePoints.fromList(goodReferencePointsList);
MatOfPoint2f goodScenePoints = new MatOfPoint2f();
goodScenePoints.fromList(goodScenePointsList);
// Find the homography.
Mat homography = Calib3d.findHomography(
goodReferencePoints, goodScenePoints);
// Use the homography to project the reference corner
// coordinates into scene coordinates.
Core.perspectiveTransform(mReferenceCorners,
mCandidateSceneCorners, homography);
// Convert the scene corners to integer format, as required
// by the Imgproc.isContourConvex function.
mCandidateSceneCorners.convertTo(mIntSceneCorners,
CvType.CV_32S);
// Check whether the corners form a convex polygon. If not,
// (that is, if the corners form a concave polygon), the
// detection result is invalid because no real perspective can
// make the corners of a rectangular image look like a concave
// polygon!
if (Imgproc.isContourConvex(mIntSceneCorners)) {
// The corners form a convex polygon, so record them as
// valid scene corners.
mCandidateSceneCorners.copyTo(mSceneCorners);
}
}
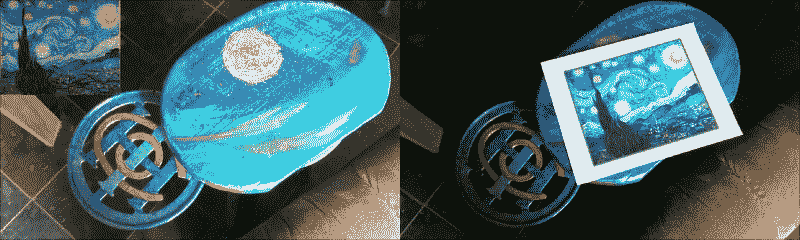
我们的另一个帮助器方法draw(Mat src, Mat dst)首先将源图像复制到目标位置。 然后,如果未跟踪目标,则在图像的一角绘制一个缩略图,以便用户知道要查找的内容。 如果正在追踪目标,我们会在其周围绘制轮廓。 以下一对屏幕快照显示了draw方法的结果,当未跟踪目标(左侧)时和在跟踪目标(右侧)时:
以下代码实现draw帮助器方法:
protected void draw(Mat src, Mat dst) {
if (dst != src) {
src.copyTo(dst);
}
if (mSceneCorners.height() < 4) {
// The target has not been found.
// Draw a thumbnail of the target in the upper-left
// corner so that the user knows what it is.
// Compute the thumbnail's larger dimension as half the
// video frame's smaller dimension.
int height = mReferenceImage.height();
int width = mReferenceImage.width();
int maxDimension = Math.min(dst.width(),
dst.height()) / 2;
double aspectRatio = width / (double)height;
if (height > width) {
height = maxDimension;
width = (int)(height * aspectRatio);
} else {
width = maxDimension;
height = (int)(width / aspectRatio);
}
// Select the region of interest (ROI) where the thumbnail
// will be drawn.
Mat dstROI = dst.submat(0, height, 0, width);
// Copy a resized reference image into the ROI.
Imgproc.resize(mReferenceImage, dstROI, dstROI.size(),
0.0, 0.0, Imgproc.INTER_AREA);
return;
}
// Outline the found target in green.
Imgproc.line(dst, new Point(mSceneCorners.get(0, 0)),
new Point(mSceneCorners.get(1, 0)), mLineColor, 4);
Imgproc.line(dst, new Point(mSceneCorners.get(1, 0)),
new Point(mSceneCorners.get(2, 0)), mLineColor, 4);
Imgproc.line(dst, new Point(mSceneCorners.get(2, 0)),
new Point(mSceneCorners.get(3, 0)), mLineColor, 4);
Imgproc.line(dst, new Point(mSceneCorners.get(3,0)),
new Point(mSceneCorners.get(0, 0)), mLineColor, 4);
}
}
提示
使代码适配 OpenCV 2.x
将Imgproc.line替换为Core.line。
尽管ImageDetectionFilter的实现比我们以前的过滤器更复杂,但它仍然具有简单的接口。 您必须使用可绘制资源实例化它,然后根据需要将过滤器应用于源图像和目标图像。
将跟踪器过滤器添加到CameraActivity
为了使用ImageDetectionFilter的实例,我们对CameraActivity进行了与上一章中其他过滤器相同的修改。 回想一下,我们所有的过滤器类都实现了Filter接口,以便CameraActivity可以类似的方式使用它们。
首先,我们需要在res/values/strings.xml中定义一些文本(用于菜单按钮):
<string name="menu_next_image_detection_filter">Next
Tracker</string>
接下来,我们需要在res/menu/activity_camera.xml中定义菜单按钮本身:
<menu xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:app="http://schemas.android.com/apk/res-auto">
<item
android:id="@+id/menu_next_image_detection_filter"
app:showAsAction="ifRoom|withText"
android:title="@string/menu_next_image_detection_filter" />
<!-- ... -->
</menu>
我们的其余修改都与CameraActivity.java有关。 我们需要添加新的成员变量来跟踪所选的图像检测过滤器:
// Keys for storing the indices of the active filters.
private static final String STATE_IMAGE_DETECTION_FILTER_INDEX =
"imageDetectionFilterIndex";
private static final String STATE_CURVE_FILTER_INDEX =
"curveFilterIndex";
private static final String STATE_MIXER_FILTER_INDEX =
"mixerFilterIndex";
private static final String STATE_CONVOLUTION_FILTER_INDEX =
"convolutionFilterIndex";
// The filters.
private Filter[] mImageDetectionFilters;
private Filter[] mCurveFilters;
private Filter[] mMixerFilters;
private Filter[] mConvolutionFilters;
// The indices of the active filters.
private int mImageDetectionFilterIndex;
private int mCurveFilterIndex;
private int mMixerFilterIndex;
private int mConvolutionFilterIndex;
初始化 OpenCV 之后,我们需要实例化所有图像检测过滤器并将它们放置在数组中。 为简便起见,我添加了两个图像检测过滤器作为示例,但您可以轻松修改以下代码以支持跟踪更多图像或不同图像:
public void onManagerConnected(final int status) {
switch (status) {
case LoaderCallbackInterface.SUCCESS:
Log.d(TAG, "OpenCV loaded successfully");
mCameraView.enableView();
mBgr = new Mat();
final Filter starryNight;
try {
starryNight = new ImageDetectionFilter(
CameraActivity.this,
R.drawable.starry_night);
} catch (IOException e) {
Log.e(TAG, "Failed to load drawable: " +
"starry_night");
e.printStackTrace();
break;
}
final Filter akbarHunting;
try {
akbarHunting = new ImageDetectionFilter(
CameraActivity.this,
R.drawable.akbar_hunting_with_cheetahs);
} catch (IOException e) {
Log.e(TAG, "Failed to load drawable: " +
"akbar_hunting_with_cheetahs");
e.printStackTrace();
break;
}
mImageDetectionFilters = new Filter[] {
new NoneFilter(),
starryNight,
akbarHunting
};
// ...
}
}
};
创建活动后,我们需要加载有关所选图像检测过滤器的所有已保存数据:
protected void onCreate(final Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
final Window window = getWindow();
window.addFlags(
WindowManager.LayoutParams.FLAG_KEEP_SCREEN_ON);
if (savedInstanceState != null) {
mCameraIndex = savedInstanceState.getInt(
STATE_CAMERA_INDEX, 0);
mImageSizeIndex = savedInstanceState.getInt(
STATE_IMAGE_SIZE_INDEX, 0);
mImageDetectionFilterIndex =
savedInstanceState.getInt(
STATE_IMAGE_DETECTION_FILTER_INDEX, 0);
mCurveFilterIndex = savedInstanceState.getInt(
STATE_CURVE_FILTER_INDEX, 0);
mMixerFilterIndex = savedInstanceState.getInt(
STATE_MIXER_FILTER_INDEX, 0);
mConvolutionFilterIndex = savedInstanceState.getInt(
STATE_CONVOLUTION_FILTER_INDEX, 0);
} else {
mCameraIndex = 0;
mImageSizeIndex = 0;
mImageDetectionFilterIndex = 0;
mCurveFilterIndex = 0;
mMixerFilterIndex = 0;
mConvolutionFilterIndex = 0;
}
// ...
}
相反,在活动被销毁之前,我们需要保存有关所选图像检测过滤器的数据:
public void onSaveInstanceState(Bundle savedInstanceState) {
// Save the current camera index.
savedInstanceState.putInt(STATE_CAMERA_INDEX, mCameraIndex);
// Save the current image size index.
savedInstanceState.putInt(STATE_IMAGE_SIZE_INDEX,
mImageSizeIndex);
// Save the current filter indices.
savedInstanceState.putInt(STATE_IMAGE_DETECTION_FILTER_INDEX,
mImageDetectionFilterIndex);
savedInstanceState.putInt(STATE_CURVE_FILTER_INDEX,
mCurveFilterIndex);
savedInstanceState.putInt(STATE_MIXER_FILTER_INDEX,
mMixerFilterIndex);
savedInstanceState.putInt(STATE_CONVOLUTION_FILTER_INDEX,
mConvolutionFilterIndex);
super.onSaveInstanceState(savedInstanceState);
}
当按下下个跟踪器菜单按钮时,需要更新所选图像检测过滤器:
public boolean onOptionsItemSelected(final MenuItem item) {
if (mIsMenuLocked) {
return true;
}
if (item.getGroupId() == MENU_GROUP_ID_SIZE) {
mImageSizeIndex = item.getItemId();
recreate();
return true;
}
switch (item.getItemId()) {
case R.id.menu_next_image_detection_filter:
mImageDetectionFilterIndex++;
if (mImageDetectionFilterIndex ==
mImageDetectionFilters.length) {
mImageDetectionFilterIndex = 0;
}
return true;
// ...
default:
return super.onOptionsItemSelected(item);
}
}
最后,当相机捕获一帧时,需要将选定的图像检测过滤器应用于该帧。 为了确保其他过滤器不会干扰图像检测,重要的是首先应用图像检测过滤器:
public Mat onCameraFrame(final CvCameraViewFrame inputFrame) {
final Mat rgba = inputFrame.rgba();
// Apply the active filters.
if (mImageDetectionFilters != null) {
mImageDetectionFilters[mImageDetectionFilterIndex].apply(
rgba, rgba);
}
if (mCurveFilters != null) {
mCurveFilters[mCurveFilterIndex].apply(rgba, rgba);
}
if (mMixerFilters != null) {
mMixerFilters[mMixerFilterIndex].apply(rgba, rgba);
}
if (mConvolutionFilters != null) {
mConvolutionFilters[mConvolutionFilterIndex].apply(
rgba, rgba);
}
if (mIsPhotoPending) {
mIsPhotoPending = false;
takePhoto(rgba);
}
if (mIsCameraFrontFacing) {
// Mirror (horizontally flip) the preview.
Core.flip(rgba, rgba, 1);
}
return rgba;
}
就这样! 打印目标图像或在屏幕上显示它们。 然后,运行应用,选择合适的图像检测过滤器,然后将相机对准目标。 如果视频太不稳定(由于图像处理缓慢),请选择较低的相机分辨率,然后重试。 另外,您可能需要将 Android 设备保持一两秒钟的静止不动,以使相机自动对焦在目标上。 然后,您应该看到目标以绿色概述。 例如,请参见以下屏幕快照中的《星空》周围的轮廓:
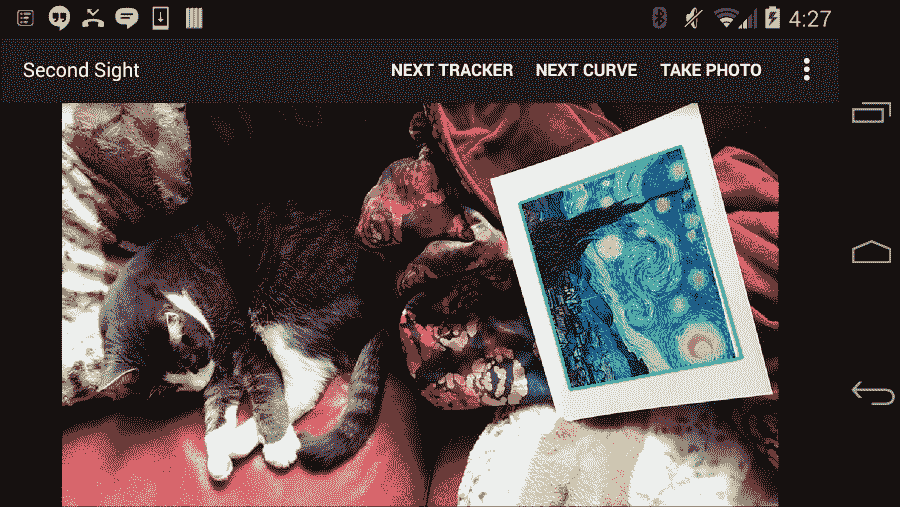
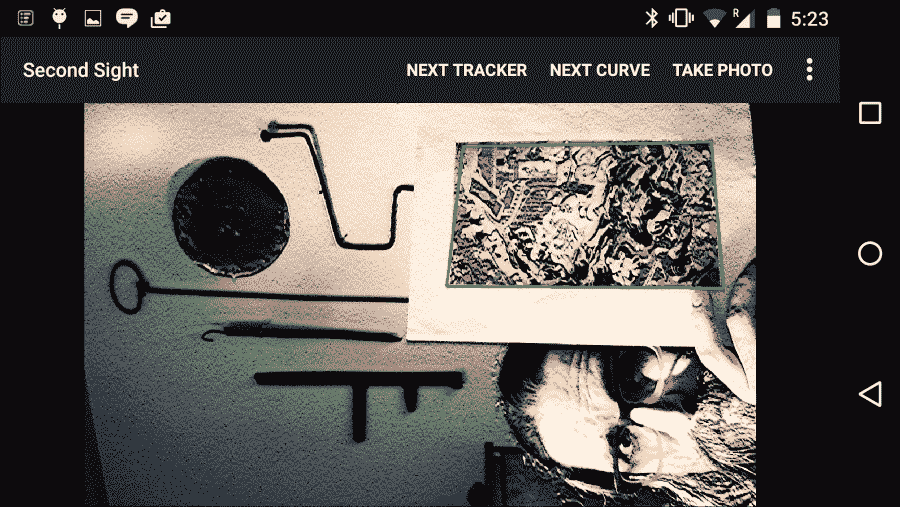
请注意,即使目标图像旋转或倾斜,图像检测过滤器也可以工作。 现在,尝试将图像检测过滤器与其他过滤器组合使用。 因为我们在其他过滤之前执行图像检测,所以目标图像在检测器中看起来仍然相同,应该被检测到。 例如,在以下屏幕截图中,请注意,即使RecolorRGVFilter,CrossProcessCurveFilter和StrokeEdgesFilter也正在运行时,也会检测到《阿克巴猎豹》(并用绿色框出):
总结
Second Sight 应用现在可以看到! 至少,它可以识别预定义集中的任何图像,并在该图像周围绘制四边形。 在某种程度上,此功能在缩放,旋转和倾斜方面都非常强大。 例如,可以在各种放大率,分辨率,距离和视角下跟踪图像。
尽管在本章中仅添加了一个类,但我们介绍了许多 OpenCV 功能。 接下来,我们将退后一步,考虑如何将该 OpenCV 功能与其他类型的图形进行集成,这些图形将实时响应摄像机的输入。 我们将在 Second Sight 的图像识别过滤器上构建一个小的 3D 渲染场景。
