八、图像和视频处理
本章包含以下方面的秘籍:
- 使用仿射和透视变换使图像变形
- 使用任意变换重新映射图像
- 使用 Lucas-Kanade 算法跟踪帧之间的关键点
- 背景减法
- 将许多图像拼接成全景图
- 使用非本地均值算法对照片降噪
- 构造 HDR 图像
- 通过图像修复消除照片中的缺陷
介绍
通过将一组图像作为一个整体而不是一堆单独的独立图像进行处理,计算机视觉算法可以实现更为出色的结果。 如果已知图像之间的相关性(可能是从不同角度拍摄的某些对象的视频文件中的帧序列),则可以利用它们。 本章使用的算法考虑了帧之间的关系。 这些算法包括背景减法,图像拼接,视频稳定,超重投影和构建 HDR 图像。
使用仿射和透视变换使图像变形
在本秘籍中,我们将介绍两种用于几何变换图像的主要方法:仿射和透视变形。 第一个用于删除简单的几何变换,例如旋转,缩放,平移及其组合,但是它不能将会聚的线变成平行的线。 在这里,透视变换开始起作用。 其目的是消除两条平行线在透视图中汇合时的透视变形。 让我们找出如何在 OpenCV 中使用所有这些转换。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块,打开输入图像,然后复制它:
import cv2
import numpy as np
img = cv2.imread('../data/circlesgrid.png', cv2.IMREAD_COLOR)
show_img = np.copy(img)
- 定义两个函数来实现点选择过程:
selected_pts = []
def mouse_callback(event, x, y, flags, param):
global selected_pts, show_img
if event == cv2.EVENT_LBUTTONUP:
selected_pts.append([x, y])
cv2.circle(show_img, (x, y), 10, (0, 255, 0), 3)
def select_points(image, points_num):
global selected_pts
selected_pts = []
cv2.namedWindow('image')
cv2.setMouseCallback('image', mouse_callback)
while True:
cv2.imshow('image', image)
k = cv2.waitKey(1)
if k == 27 or len(selected_pts) == points_num:
break
cv2.destroyAllWindows()
return np.array(selected_pts, dtype=np.float32)
- 选择图像中的三个点,使用
cv2.getAffineTransform计算仿射变换,然后使用cv2.warpAffine应用仿射变换。 然后,显示结果图像:
show_img = np.copy(img)
src_pts = select_points(show_img, 3)
dst_pts = np.array([[0, 240], [0, 0], [240, 0]], dtype=np.float32)
affine_m = cv2.getAffineTransform(src_pts, dst_pts)
unwarped_img = cv2.warpAffine(img, affine_m, (240, 240))
cv2.imshow('result', np.hstack((show_img, unwarped_img)))
k = cv2.waitKey()
cv2.destroyAllWindows()
- 找到一个仿射逆变换,将其应用并显示结果:
inv_affine = cv2.invertAffineTransform(affine_m)
warped_img = cv2.warpAffine(unwarped_img, inv_affine, (320, 240))
cv2.imshow('result', np.hstack((show_img, unwarped_img, warped_img)))
k = cv2.waitKey()
cv2.destroyAllWindows()
- 使用
cv2.getRotationMatrix2D创建一个旋转比例的仿射扭曲,并将其应用于图像:
rotation_mat = cv2.getRotationMatrix2D(tuple(src_pts[0]), 6, 1)
rotated_img = cv2.warpAffine(img, rotation_mat, (240, 240))
cv2.imshow('result', np.hstack((show_img, rotated_img)))
k = cv2.waitKey()
cv2.destroyAllWindows()
- 在图像中选择四个点,使用
cv2.getPerspectiveTransform创建透视变形矩阵,然后将其应用于图像并显示结果:
show_img = np.copy(img)
src_pts = select_points(show_img, 4)
dst_pts = np.array([[0, 240], [0, 0], [240, 0], [240, 240]], dtype=np.float32)
perspective_m = cv2.getPerspectiveTransform(src_pts, dst_pts)
unwarped_img = cv2.warpPerspective(img, perspective_m, (240, 240))
cv2.imshow('result', np.hstack((show_img, unwarped_img)))
k = cv2.waitKey()
cv2.destroyAllWindows()
这个怎么运作
仿射变换和透视图变换本质上都是矩阵乘法运算,其中元素的位置被某些扭曲矩阵重新映射。 因此,要应用变换,我们需要计算这样的翘曲矩阵。 对于仿射变换,可以使用cv2.getAffineTransform函数完成。 它以两组点作为参数:第一个点包含变换之前的三个点,第二个点包含变形后的三个对应点。 集合中点的顺序确实很重要,两个数组的点顺序应该相同。 要在透视扭曲的情况下创建变换矩阵,可以应用cv2.getPerspectiveTransform。
同样,它在扭曲前后接受两组点,但是点集的长度应为4。 这两个函数都返回转换矩阵,但是它们的形状不同:cv2.getAffineTransform计算2x3矩阵,cv2.getPerspectiveTransform计算3x3矩阵。
要应用计算的转换,我们需要调用相应的 OpenCV 函数。 为了进行仿射变形,使用了cv2.warpAffine。 它获取输入图像,2x3转换矩阵,输出图像大小,像素插值模式,边界外推模式和边界外推值。 cv2.warpPerspective用于应用透视变换。 其参数与cv2.warpAffine的含义相同。 唯一的区别是转换矩阵(第二个参数)必须为3x3。 这两个函数都返回变形的图像。
有两个与仿射变换相关的有用函数:cv2.invertAffineTransform和cv2.getRotationMatrix2D。 第一种是在您进行仿射变换并且需要获得逆仿射(也就是仿射)时使用。 它采用此现有的仿射变换并返回反变换。 cv2.getRotationMatrix2D不太通用,但经常用于仿射变换-缩放旋转。 此函数采用以下参数:(x,y)格式的旋转中心点,旋转角度和比例因子,并返回2x3仿射变换矩阵。 该矩阵可用作cv2.warpAffine中的相应参数。
启动代码后,您将获得类似于以下内容的图像:
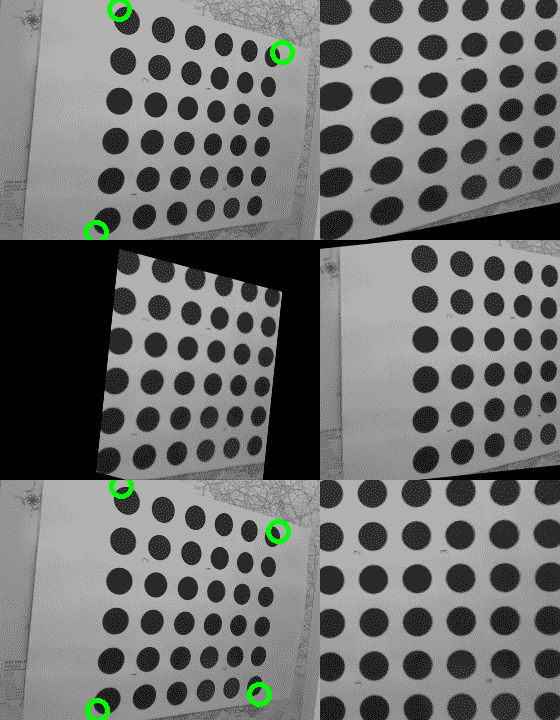
图中的第一行是具有三个选定点及其对应的仿射变换的输入图像。 第二行是逆变换和带比例变换的旋转的结果; 第三行包含具有四个选定点的输入图像,是透视变换的结果。
使用任意变换重新映射图像
在本秘籍中,您将学习如何使用每像素映射来变换图像。 这是一项非常通用的功能,已在许多计算机视觉应用中使用,例如图像拼接,相机帧不失真以及许多其他功能。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import math
import cv2
import numpy as np
- 加载测试图像:
img = cv2.imread('../data/Lena.png')
- 准备每个像素的变换图:
xmap = np.zeros((img.shape[1], img.shape[0]), np.float32)
ymap = np.zeros((img.shape[1], img.shape[0]), np.float32)
for y in range(img.shape[0]):
for x in range(img.shape[1]):
xmap[y,x] = x + 30 * math.cos(20 * x / img.shape[0])
ymap[y,x] = y + 30 * math.sin(20 * y / img.shape[1])
- 重新映射源图像:
remapped_img = cv2.remap(img, xmap, ymap, cv2.INTER_LINEAR, None, cv2.BORDER_REPLICATE)
- 可视化结果:
plt.figure(0)
plt.axis('off')
plt.imshow(remapped_img[:,:,[2,1,0]])
plt.show()
这个怎么运作
通用的逐像素转换是通过cv2.remap函数实现的。 它接受一个源图像和两个映射(可以作为具有两个通道的一个映射来传递),并返回转换后的图像。 该函数还接受指定必须执行像素值内插和外推的参数。 在我们的情况下,我们指定双线性插值,超出范围的值将替换为最近的(空间上)范围内的像素值。 该函数非常通用,通常用作许多计算机视觉应用的构建块。
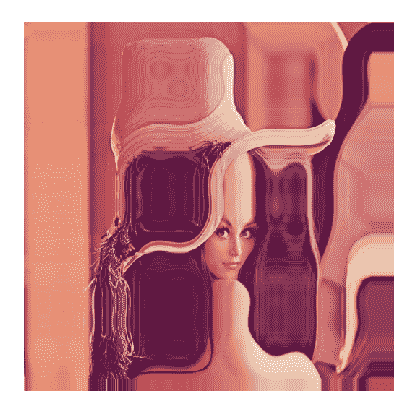
以下是预期的结果:
使用 Lucas-Kanade 算法跟踪帧之间的关键点
在本秘籍中,您将学习如何使用稀疏的 Lucas-Kanade 光流算法来跟踪视频中帧之间的关键点。 此功能在许多计算机视觉应用中很有用,例如对象跟踪和视频稳定化。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
- 打开测试视频并初始化辅助变量:
video = cv2.VideoCapture('../data/traffic.mp4')
prev_pts = None
prev_gray_frame = None
tracks = None
- 开始阅读视频中的帧,将每个图像转换为灰度:
while True:
retval, frame = video.read()
if not retval: break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
- 使用稀疏的 Lucas-Kanade 光流算法跟踪上一帧的关键点,或者,如果您刚刚启动或按下
C,请检测关键点,以便在下一帧中可以跟踪一些内容:
if prev_pts is not None:
pts, status, errors = cv2.calcOpticalFlowPyrLK(
prev_gray_frame, gray_frame, prev_pts, None, winSize=(15,15), maxLevel=5,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
good_pts = pts[status == 1]
if tracks is None: tracks = good_pts
else: tracks = np.vstack((tracks, good_pts))
for p in tracks:
cv2.circle(frame, (p[0], p[1]), 3, (0, 255, 0), -1)
else:
pts = cv2.goodFeaturesToTrack(gray_frame, 500, 0.05, 10)
pts = pts.reshape(-1, 1, 2)
- 记住当前点和当前框架。 现在可视化结果并处理键盘输入:
prev_pts = pts
prev_gray_frame = gray_frame
cv2.imshow('frame', frame)
key = cv2.waitKey() & 0xff
if key == 27: break
if key == ord('c'):
tracks = None
prev_pts = None
- 关闭所有窗口:
cv2.destroyAllWindows()
这个怎么运作
在本秘籍中,我们打开一个视频,使用我们先前使用的cv2.goodFeaturesToTrack函数检测初始关键点,并使用稀疏的 Lucas-Kanade 光流算法开始跟踪点,该算法已在 OpenCV 中通过cv2.calcOpticalFlowPyrLK函数实现 。 OpenCV 实现了该算法的金字塔形式,这意味着首先在较小尺寸的图像中计算光流,然后在较大的图像中进行精修。 金字塔大小由maxLevel参数控制。 该函数还采用 Lucas-Kanade 算法的参数,例如窗口大小(winSize)和终止条件。 其他参数是前一帧和当前帧,以及来自前一帧的关键点。 这些函数返回当前帧中的跟踪点,成功标志数组和跟踪错误。
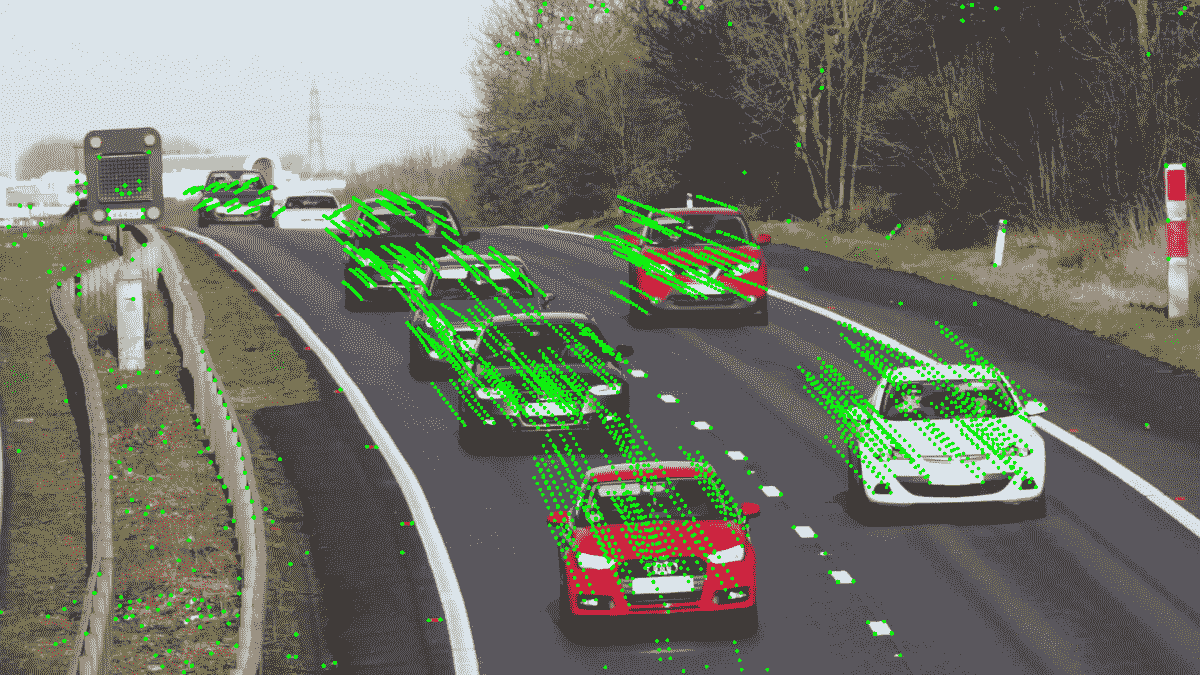
下图是积分跟踪结果的示例:
背景扣除
如果您有一个稳定场景的视频,其中有一些物体在四处移动,则可以将静止的背景与变化的前景分开。 在这里,我们将向您展示如何在 OpenCV 中进行操作。
准备
在继续此秘籍之前,您需要安装带有 Contrib 模块的 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
import numpy as np
- 定义一个打开视频文件的函数,并对每个帧应用一些背景减影算法:
def split_image_fgbg(subtractor, open_sz=(0,0), close_sz=(0,0), show_bg=False, show_shdw=False):
kernel_open = kernel_close = None
if all(i > 0 for i in open_sz):
kernel_open = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, open_sz)
if all(i > 0 for i in close_sz):
kernel_close = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, close_sz)
cap = cv2.VideoCapture('../data/traffic.mp4')
while True:
status_cap, frame = cap.read()
if not status_cap:
break
frame = cv2.resize(frame, None, fx=0.5, fy=0.5)
fgmask = subtractor.apply(frame)
objects_mask = (fgmask == 255).astype(np.uint8)
shadows_mask = (fgmask == 127).astype(np.uint8)
if kernel_open is not None:
objects_mask = cv2.morphologyEx(objects_mask, cv2.MORPH_OPEN, kernel_open)
if kernel_close is not None:
objects_mask = cv2.morphologyEx(objects_mask, cv2.MORPH_CLOSE, kernel_close)
if kernel_open is not None:
shadows_mask = cv2.morphologyEx(shadows_mask, cv2.MORPH_CLOSE, kernel_open)
foreground = frame
foreground[objects_mask == 0] = 0
if show_shdw:
foreground[shadows_mask > 0] = (0, 255, 0)
cv2.imshow('foreground', foreground)
if show_bg:
background = fgbg.getBackgroundImage()
if background is not None:
cv2.imshow('background', background)
if cv2.waitKey(30) == 27:
break
cap.release()
cv2.destroyAllWindows()
- 将由 KadewTraKuPong 和 Bowden 创建的基于高斯混合的背景/前景分割算法应用于视频:
fgbg = cv2.bgsegm.createBackgroundSubtractorMOG()
split_image_fgbg(fgbg, (2, 2), (40, 40))
- 创建由 Zoran Zivkovic 开发的高斯混合分割算法的改进版本的实例:
fgbg = cv2.createBackgroundSubtractorMOG2()
split_image_fgbg(fgbg, (3, 3), (30, 30), True)
- 使用 Godbehere,Matsukawa 和 Goldberg 的背景减除算法创建背景遮罩:
fgbg = cv2.bgsegm.createBackgroundSubtractorGMG()
split_image_fgbg(fgbg, (5, 5), (25, 25))
- 根据 Sagi Zeevi 的建议,应用基于计数的背景减法算法:
fgbg = cv2.bgsegm.createBackgroundSubtractorCNT()
split_image_fgbg(fgbg, (5, 5), (15, 15), True)
- 使用基于最近邻方法的背景分割技术:
fgbg = cv2.createBackgroundSubtractorKNN()
split_image_fgbg(fgbg, (5, 5), (25, 25), True)
这个怎么运作
所有背景减法器都实现cv2.BackgroundSubtractor接口,因此它们都有一定的方法集:
cv2.BackgroundSubtractor.apply:获取分割遮罩cv2.BackgroundSubtractor.getBackgroundImage:检索背景图像
apply方法接受彩色图像作为参数并返回背景遮罩。 此遮罩通常包含三个值:0用于背景像素,255用于前景像素和127用于阴影像素。 阴影像素是背景中强度较低的像素。 值得一提的是,并非所有减法器都支持阴影像素分析。
getBackgroundImage返回背景图像,如果没有移动的物体,则应返回背景图像。 同样,只有少数减法器能够计算这样的图像。
毫不奇怪,所有减法算法都有内部参数。 幸运的是,这些参数中的许多都可以与默认值一起很好地工作。 历史参数是可以首先调整的参数之一。 基本上,这是减法器开始生成分段掩码之前需要分析的帧数。 因此,通常您会获得第一帧的完整背景遮罩。
您已经注意到,我们将形态学操作应用于运动对象遮罩。 由于几个原因,我们需要此步骤。 首先,运动物体的某些部分可能质地较差。 由于所有相邻像素都非常相似,因此很难检测运动。 第二个原因是我们的背景分割检测器不够理想。 错误地将移动物体的一部分标记为背景会导致错误。 应用形态学可以帮助我们使用先验信息,这些信息不能仍然是运动对象中的一部分。
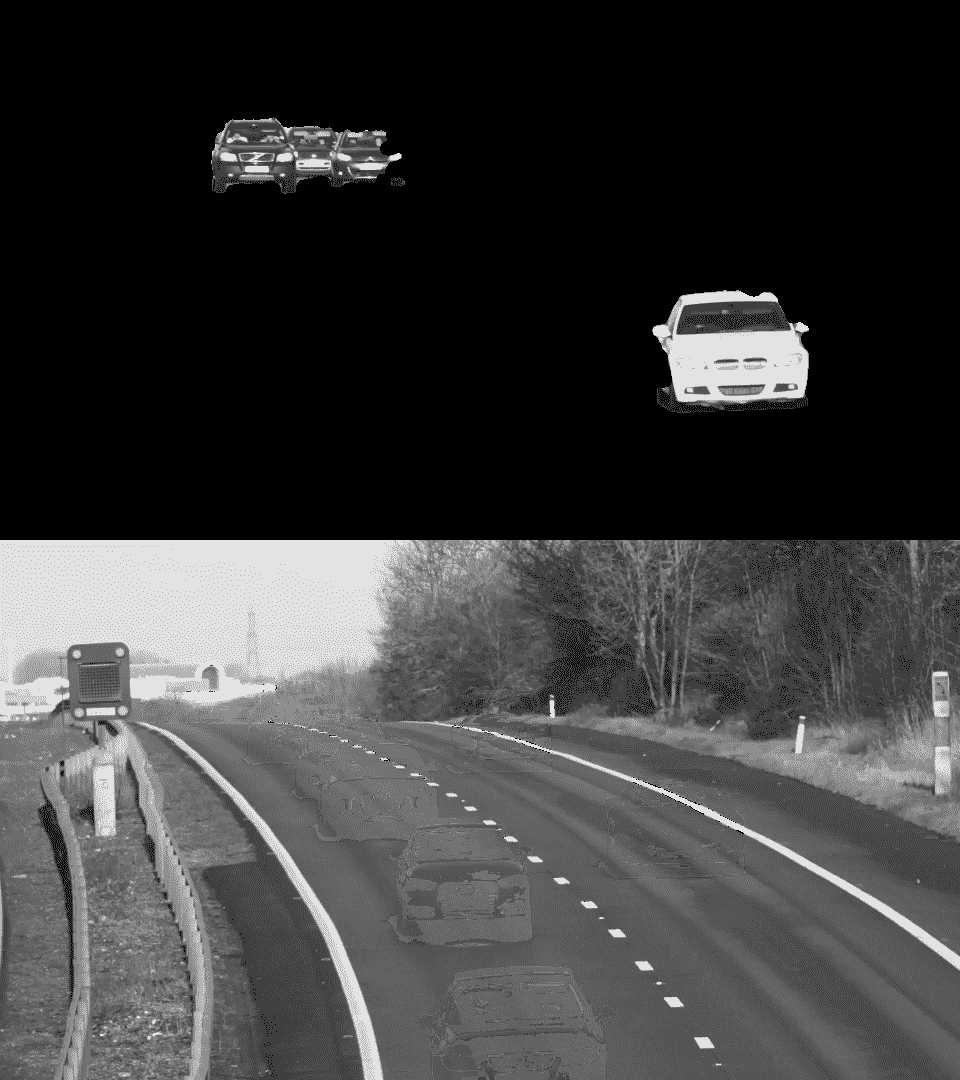
上面的代码生成的图像类似于下图:
将许多图像拼接成全景图
OpenCV 有很多计算机视觉算法。 其中一些是低级的,而另一些则在特殊情况下使用。 但是有功能,可以使用日常应用将许多算法结合在一起。 这些管道之一是全景拼接。 这个相当复杂的过程可以在 OpenCV 中轻松完成,并得到不错的结果。 此秘籍向您展示如何使用 OpenCV 工具创建自己的全景图。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
import numpy as np
- 加载我们将要合并为全景图的图像:
images = []
images.append(cv2.imread('../data/panorama/0.jpg', cv2.IMREAD_COLOR))
images.append(cv2.imread('../data/panorama/1.jpg', cv2.IMREAD_COLOR))
- 创建一个全景拼接器,将图像传递给它,然后解析结果:
stitcher = cv2.createStitcher()
ret, pano = stitcher.stitch(images)
if ret == cv2.STITCHER_OK:
cv2.imshow('panorama', pano)
cv2.waitKey()
cv2.destroyAllWindows()
else:
print('Error during stiching')
这个怎么运作
cv2.createStitcher建立了全景拼接算法的实例。 要将其应用于全景图创建,您需要调用其stitch方法。 此方法接受要组合的图像数组,并返回拼接结果状态以及全景图像。 状态可能具有以下值之一:
cv2.STITCHER_OKcv2.STITCHER_ERR_NEED_MORE_IMGScv2.STITCHER_ERR_HOMOGRAPHY_EST_FAILcv2.STITCHER_ERR_CAMERA_PARAMS_ADJUST_FAIL
第一个值表示成功创建了全景图。 其他值告诉您全景图尚未合成,并向您提示了可能的原因。
拼接成功与否取决于输入图像。 它们应该具有重叠的区域。 重叠的区域越多,算法就越容易匹配框架并将其正确映射到最终全景图。 另外,最好从旋转的相机拍摄照片。 相机的微小移动是可以的,但是是不希望的。
执行代码后,您将看到类似于下图的图像:
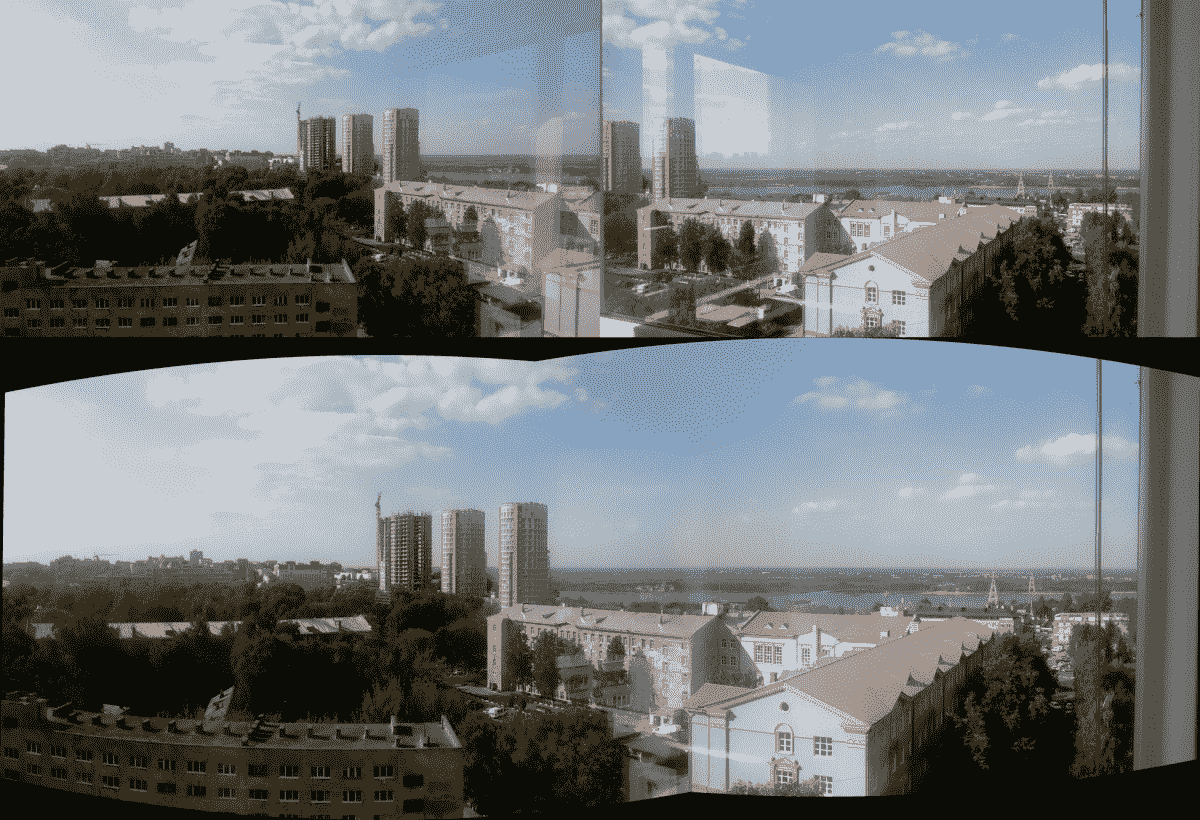
正如您在图中看到的,反射并没有破坏最终结果:该算法成功处理了这种情况。 由于图像具有大的重叠区域和许多具有丰富纹理的区域,因此可以实现此结果。 对于没有纹理的物体,反射可能会受到阻碍。
使用非本地均值算法的照片降噪
在本秘籍中,您将学习如何使用非局部均值算法消除图像中的噪点。 当照片受到过多噪点的影响时,此功能很有用,因此有必要将其删除以获得更好的图像。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
import numpy as np
import matplotlib.pyplot as plt
- 加载测试图像:
img = cv2.imread('../data/Lena.png')
- 产生随机的高斯噪声:
noise = 30 * np.random.randn(*img.shape)
img = np.uint8(np.clip(img + noise, 0, 255))
- 使用非本地均值算法执行去噪:
denoised_nlm = cv2.fastNlMeansDenoisingColored(img, None, 10)
- 可视化结果:
plt.figure(0, figsize=(10,6))
plt.subplot(121)
plt.axis('off')
plt.title('original')
plt.imshow(img[:,:,[2,1,0]])
plt.subplot(122)
plt.axis('off')
plt.title('denoised')
plt.imshow(denoised_nlm[:,:,[2,1,0]])
plt.show()
这个怎么运作
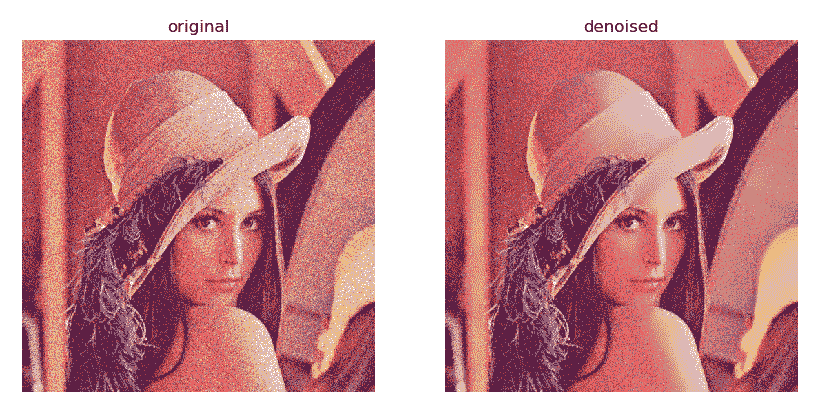
非本地均值算法是通过 OpenCV 中的一系列函数实现的:cv2.fastNlMeansDenoising,cv2.fastNlMeansDenoisingColored,cv2.fastNlMeansMulti和cv2.fastNlMeansDenoisingColoredMulti。 这些函数可以拍摄一张图像或多张图像(灰度或彩色)。 在此秘籍中,我们使用了cv2.fastNlMeansDenoisingColored函数,该函数会拍摄一张 BGR 图像并返回去噪的图像。 该函数采用一些参数,其中参数h代表降噪强度; 较高的值可减少噪点,但图像更平滑。 其他参数指定非本地均值算法参数,例如模板模式大小和搜索窗口空间(相应命名)。
下图显示了预期的结果:
构造 HDR 图像
几乎所有现代相机甚至手机都具有神奇的 HDR 模式,它产生了真正的奇迹效果-照片中没有曝光不足或曝光过度的区域。 HDR(高动态范围),您可以在 OpenCV 中重现这样的结果! 本秘籍告诉您有关 HDR 成像功能以及如何正确使用它们的信息。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
import numpy as np
- 加载图像和曝光时间:
imgs_names = ['33', '100', '179', '892', '1560', '2933']
exp_times = []
images = []
for name in imgs_names:
exp_times.append(1/float(name))
images.append(cv2.imread('../data/hdr/%s.jpg' % name, cv2.IMREAD_COLOR))
exp_times = np.array(exp_times).astype(np.float32)
- 恢复 CRF:
calibrate = cv2.createCalibrateDebevec()
response = calibrate.process(images, exp_times)
- 计算 HDR 图像:
merge_debevec = cv2.createMergeDebevec()
hdr = merge_debevec.process(images, exp_times, response)
- 将 HDR 图像转换为低动态范围(LDR)图像以能够显示它:
tonemap = cv2.createTonemapDurand(2.4)
ldr = tonemap.process(hdr)
ldr = cv2.normalize(ldr, None, 0, 1, cv2.NORM_MINMAX)
cv2.imshow('ldr', ldr)
cv2.waitKey()
cv2.destroyAllWindows()
- 应用此技术合并具有各种曝光度的图像:
merge_mertens = cv2.createMergeMertens()
fusion = merge_mertens.process(images)
fusion = cv2.normalize(fusion, None, 0, 1, cv2.NORM_MINMAX)
cv2.imshow('fusion', fusion)
cv2.waitKey()
cv2.destroyAllWindows()
这个怎么运作
首先,您需要具有一组已知曝光时间不同的图像。 现代相机将大量信息(包括曝光时间)存储在图像文件中,因此值得检查图像的属性。
计算 HDR 图像时,首先需要恢复 CRF(相机响应函数),这是每种颜色的实际强度与像素强度(在[0, 255]范围内)之间的映射。 通道。 通常它是非线性的,因此不可能简单地将不同曝光的图像组合在一起。 可以通过使用cv2.createCalibrateDebevec创建校准算法的实例来完成。 创建校准实例后,您需要调用其process方法并传递图像数组和曝光时间数组。 process方法返回摄像机的 CRF。
下一步是创建 HDR 图像。 为此,我们应该通过调用cv2.createMergeDebevec获得照片合并算法的实例。 构造对象时,我们需要调用其process方法并传递图像,曝光时间和 CRF 作为参数。 结果,我们获得了 HDR 图像,该图像无法用imshow显示,但是可以用imwrite以.hdr格式保存并在专用工具中查看。
现在我们需要显示我们的 HDR 图像。 为此,我们需要将其动态范围正确地压缩到 8 位。 此过程称为音调映射。 要执行此过程,您需要使用cv2.createTonemapDurand构建一个音调映射对象并调用其process函数。 此函数接受 HDR 图像并返回浮点图像。
还有另一种方法来合并具有不同曝光度的照片。 您需要使用cv2.createMergeMertens函数创建另一个算法实例。 生成的对象具有process方法,该方法合并了我们的图像-只需将它们作为参数传递即可。 函数工作的结果是合并图像。
从该秘籍启动代码后,您将看到类似于下图所示的图像:

图的第一行是两张具有不同曝光量的原始图像:左一张的曝光时间长,而右一张的曝光时间短。 结果,我们可以看到灯泡旁边的台灯标签和 QR 码。 最下面的行包含秘籍代码中两种方法的结果-在两种情况下,我们都可以看到所有详细信息。
通过图像修复消除照片中的缺陷
有时,照片图像有缺陷。 对于已扫描的旧照片尤其如此:它们可能有划痕,斑点和污点。 所有这些缺陷都会阻碍照片的欣赏。 根据其周围环境重建图像各部分的过程称为“修复”,而 OpenCV 具有此算法的实现。 在这里,我们将介绍利用此 OpenCV 功能的方法。
准备
在继续此秘籍之前,您需要安装 OpenCV 版本 3.3(或更高版本)Python API 包。
怎么做
您需要完成以下步骤:
- 导入必要的模块:
import cv2
import numpy as np
- 定义一个封装掩码创建的类:
class MaskCreator:
def __init__(self, image, mask):
self.prev_pt = None
self.image = image
self.mask = mask
self.dirty = False
self.show()
cv2.setMouseCallback('mask', self.mouse_callback)
def show(self):
cv2.imshow('mask', self.image)
def mouse_callback(self, event, x, y, flags, param):
pt = (x, y)
if event == cv2.EVENT_LBUTTONDOWN:
self.prev_pt = pt
elif event == cv2.EVENT_LBUTTONUP:
self.prev_pt = None
if self.prev_pt and flags & cv2.EVENT_FLAG_LBUTTON:
cv2.line(self.image, self.prev_pt, pt, (127,)*3, 5)
cv2.line(self.mask, self.prev_pt, pt, 255, 5)
self.dirty = True
self.prev_pt = pt
self.show()
- 加载图像,创建其缺陷版本和遮罩,应用 Inpaint 算法,然后显示结果:
img = cv2.imread('../data/Lena.png')
defect_img = img.copy()
mask = np.zeros(img.shape[:2], np.uint8)
m_creator = MaskCreator(defect_img, mask)
while True:
k = cv2.waitKey()
if k == 27:
break
if k == ord('a'):
res_telea = cv2.inpaint(defect_img, mask, 3, cv2.INPAINT_TELEA)
res_ns = cv2.inpaint(defect_img, mask, 3, cv2.INPAINT_NS)
cv2.imshow('TELEA vs NS', np.hstack((res_telea, res_ns)))
if k == ord('c'):
defect_img[:] = img
mask[:] = 0
m_creator.show()
cv2.destroyAllWindows()
这个怎么运作
要在 OpenCV 中修复图像,需要使用cv2.inpaint函数。 它接受四个参数:
- 有缺陷的图像:它必须是 8 位彩色或灰度级图像
- 缺陷遮罩:它必须是 8 位单通道,并且必须与第一个参数中的图像大小相同
- 邻域半径:损坏的像素周围区域的大小,应在计算其颜色时使用
- 修复模式:修复算法的类型
缺陷遮罩应包含原始图像上像素的非零值,需要恢复该值。 邻域半径是在修复过程中考虑的算法周围的像素范围; 它应具有较小的值,以防止剧烈的模糊效果。 修复模式必须为以下值之一:cv2.INPAINT_TELEA或cv2.INPAINT_NS。 根据具体情况,一种算法可能会比另一种算法更好,反之亦然,因此最好比较两种算法的结果并选择最佳算法。 cv2.inpaint返回生成的修复图像。
启动代码后,您将看到类似的图像:

如上图所示,最容易修复的缺陷是很小或几乎没有纹理的区域,这不足为奇。 修复算法没有实现任何魔术,因此在图像的复杂部分中存在可见但有色的瑕疵。
