八、对象跟踪
在本章中,我们将学习有关在实时视频中跟踪对象的信息。 我们将讨论可用于跟踪对象的不同特征。 我们还将学习有关对象跟踪的不同方法和技术。
在本章结束时,您将了解:
- 如何使用帧差异
- 如何使用色彩空间跟踪有色对象
- 如何构建交互式对象跟踪器
- 如何构建特征跟踪器
- 如何建立视频监控系统
帧差异
这可能是我们可以用来查看视频的哪些部分正在移动的最简单的技术。 当我们考虑实时视频流时,连续帧之间的差异为我们提供了很多信息。 这个概念非常简单! 我们只求连续帧之间的差异并显示差异。
如果我们从左向右快速移动,我们将看到类似以下内容:
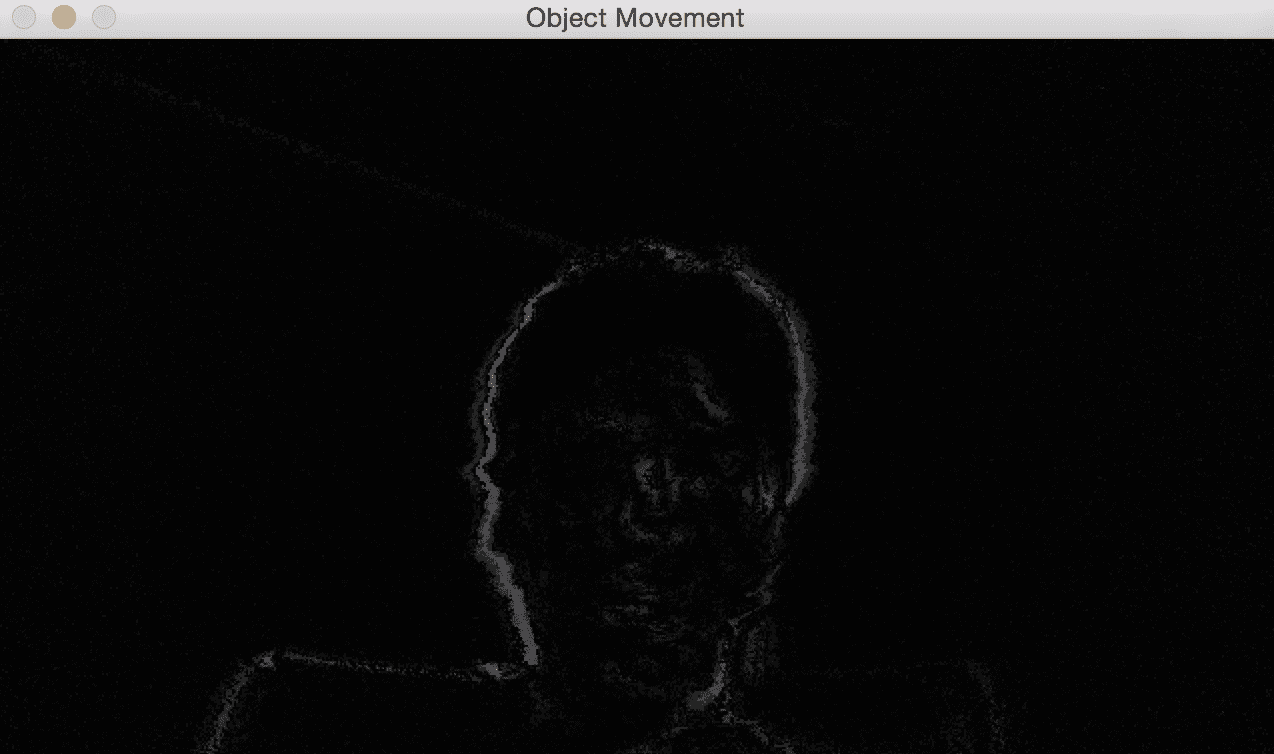
从上一张图像可以看到,只有视频中的移动部分被突出显示。 这为我们提供了一个很好的起点,以了解视频中哪些区域正在移动。 这是执行此操作的代码:
import cv2
# Compute the frame difference
def frame_diff(prev_frame, cur_frame, next_frame):
# Absolute difference between current frame and next frame
diff_frames1 = cv2.absdiff(next_frame, cur_frame)
# Absolute difference between current frame and
# previous frame
diff_frames2 = cv2.absdiff(cur_frame, prev_frame)
# Return the result of bitwise 'AND' between the
# above two resultant images to obtain a mask where
# only the areas with white pixels are shown
return cv2.bitwise_and(diff_frames1, diff_frames2)
# Capture the frame from webcam
def get_frame(cap, scaling_factor):
# Capture the frame
ret, frame = cap.read()
# Resize the image
frame = cv2.resize(frame, None, fx=scaling_factor,
fy=scaling_factor, interpolation=cv2.INTER_AREA)
return frame
if __name__=='__main__':
cap = cv2.VideoCapture(0)
scaling_factor = 0.5
cur_frame, prev_frame, next_frame = None, None, None
while True:
frame = get_frame(cap, scaling_factor)
prev_frame = cur_frame
cur_frame = next_frame
# Convert frame to grayscale image
next_frame = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY)
if prev_frame is not None:
cv2.imshow("Object Movement", frame_diff(prev_frame, cur_frame, next_frame))
key = cv2.waitKey(delay=10)
if key == 27:
break
cv2.destroyAllWindows()
已使用 10 毫秒的延迟来使帧之间有足够的时间来产生实际的显着差异。
基于色彩空间的跟踪
帧差异为我们提供了一些有用的信息,但是我们不能使用它来构建有意义的任何东西。 为了构建一个好的对象跟踪器,我们需要了解可以使用哪些特征来使我们的跟踪功能强大而准确。 因此,让我们朝这个方向迈出一步,看看如何使用颜色空间提出一个好的跟踪器。 正如我们在前几章中讨论的那样,当涉及到人类感知时, HSV 颜色空间非常有用。 我们可以将图像转换为 HSV 空间,然后使用颜色空间阈值跟踪给定的对象。
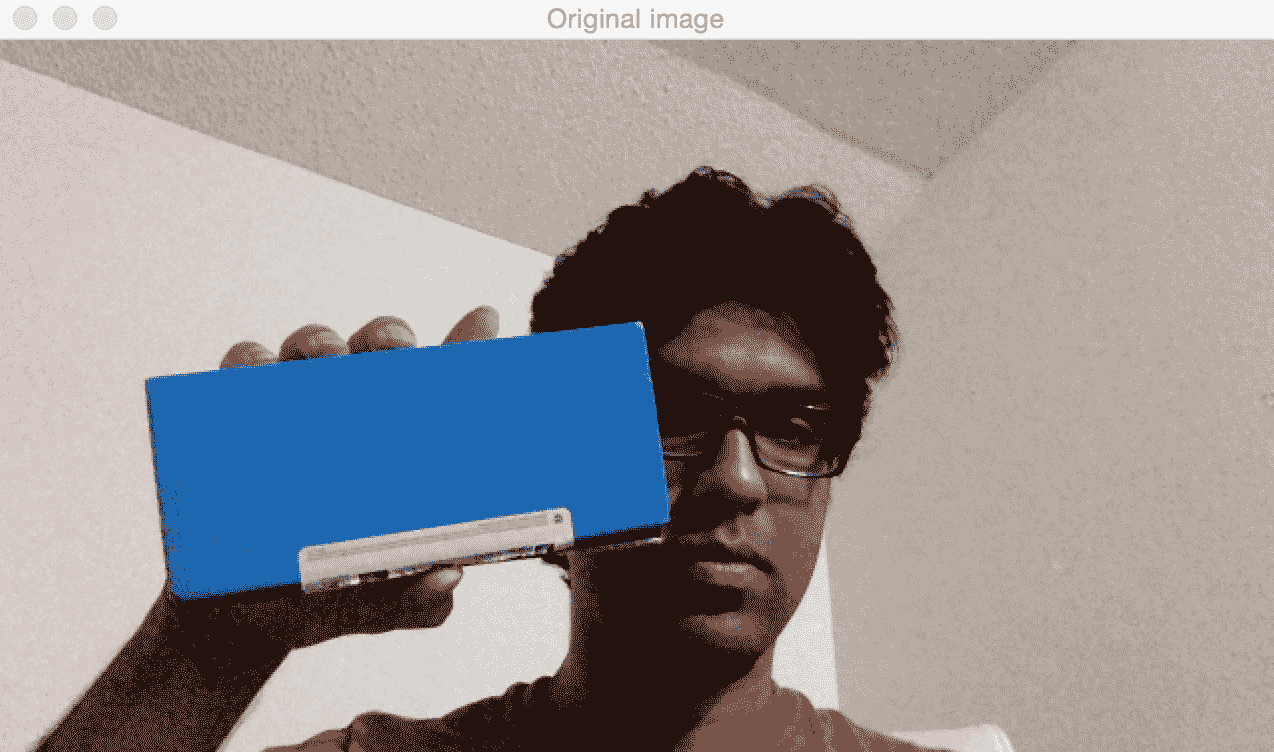
考虑视频中的以下帧:
如果通过颜色空间过滤器运行它并跟踪对象,则会看到以下内容:
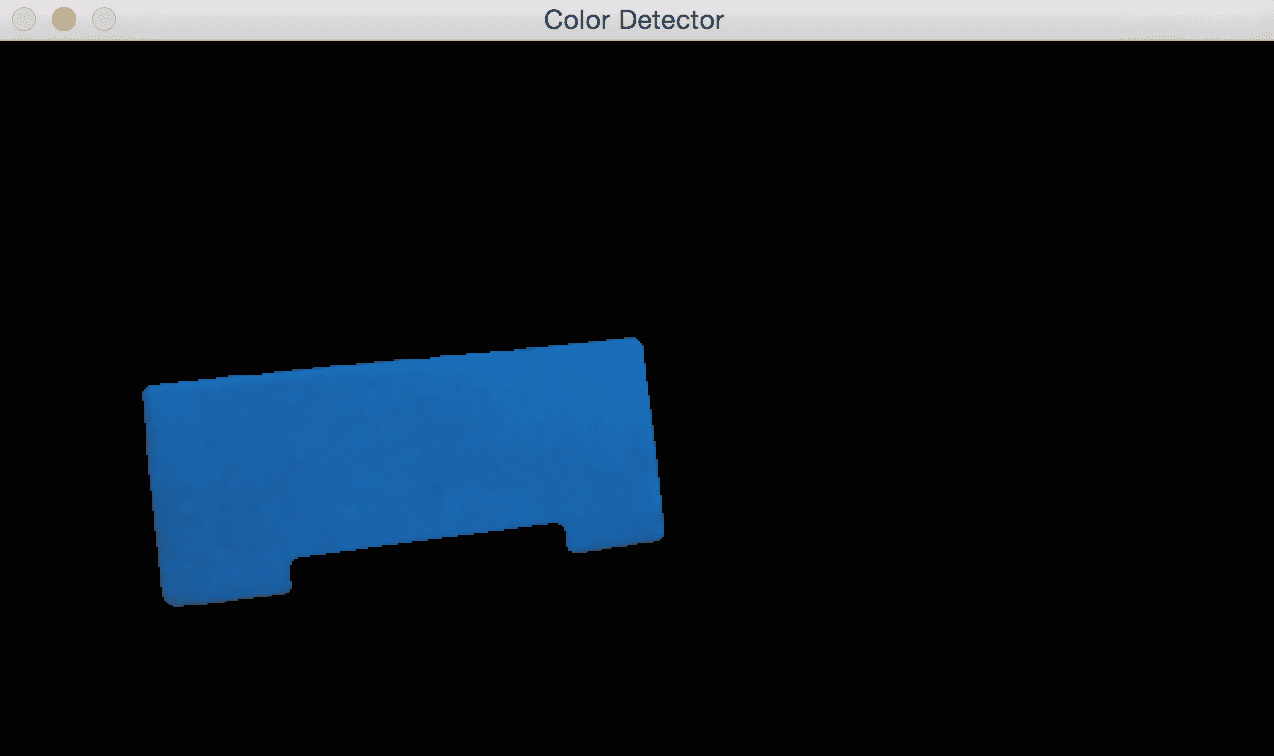
就像我们在这里看到的那样,我们的跟踪器会根据颜色特征识别视频中的特定对象。 为了使用此跟踪器,我们需要知道目标对象的颜色分布。 以下是代码:
import cv2
import numpy as np
if __name__=='__main__':
cap = cv2.VideoCapture(0)
scaling_factor = 0.5
# Define 'blue' range in HSV color space
lower = np.array([60,100,100])
upper = np.array([180,255,255])
while True:
frame = get_frame(cap, scaling_factor)
# Convert the HSV color space
hsv_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Threshold the HSV image to get only blue color
mask = cv2.inRange(hsv_frame, lower, upper)
# Bitwise-AND mask and original image
res = cv2.bitwise_and(frame, frame, mask=mask)
res = cv2.medianBlur(res, ksize=5)
cv2.imshow('Original image', frame)
cv2.imshow('Color Detector', res)
# Check if the user pressed ESC key
c = cv2.waitKey(delay=10)
if c == 27:
break
cv2.destroyAllWindows()
构建一个交互式对象跟踪器
基于颜色空间的跟踪器使我们可以自由跟踪有色对象,但是我们也只能使用预定义的颜色。 如果我们只想随机选择一个对象怎么办? 我们如何构建一个对象跟踪器,以了解所选对象的特征并自动跟踪它? 这就是 CAMShift 算法的意思,它代表连续自适应均值偏移。 它基本上是 Meanshift 算法的改进版本。
Meanshift 的概念实际上很简单。 假设我们选择了一个兴趣区域,并且希望我们的对象跟踪器跟踪该对象。 在该区域中,我们基于颜色直方图选择一堆点并计算质心。 如果质心位于该区域的中心,则说明该对象没有移动。 但是,如果质心不在此区域的中心,那么我们知道对象正在朝某个方向移动。 重心的移动控制对象移动的方向。 因此,我们将边界框移动到新位置,以便新质心成为此边界框的中心。 因此,此算法称为均值移位,因为均值(即质心)正在移动。 这样,我们就可以使用对象的当前位置进行更新。
但是,Meanshift 的问题在于不允许更改边界框的大小。 当您将物体移离相机时,人眼看起来物体会变小,但是 Meanshift 不会考虑这一点。 在整个跟踪会话中,边界框的大小将保持不变。 因此,我们需要使用 CAMShift。 CAMShift 的优点在于,它可以使边界框的大小适合对象的大小。 除此之外,它还可以跟踪对象的方向。
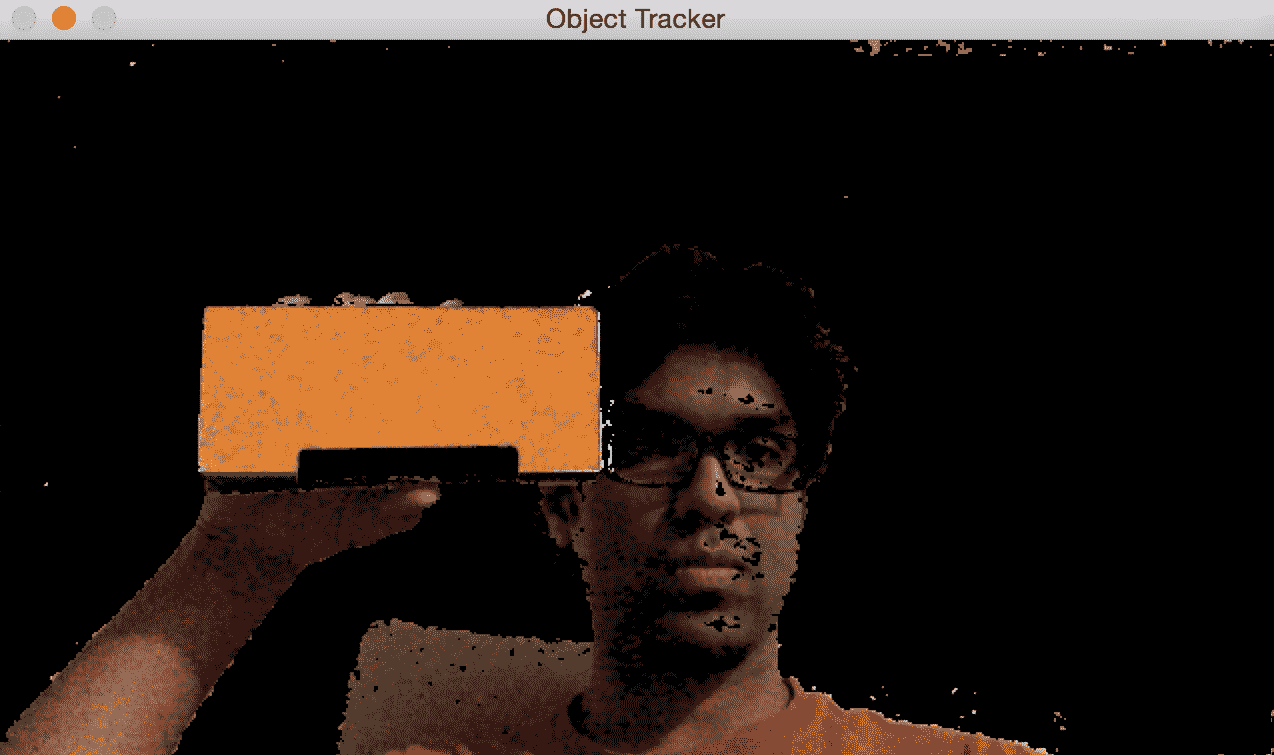
让我们考虑以下框架,其中对象以橙色突出显示(我手中的框):
现在我们已经选择了对象,该算法将计算直方图反投影并提取所有信息。 让我们移动对象,看看它是如何被跟踪的:
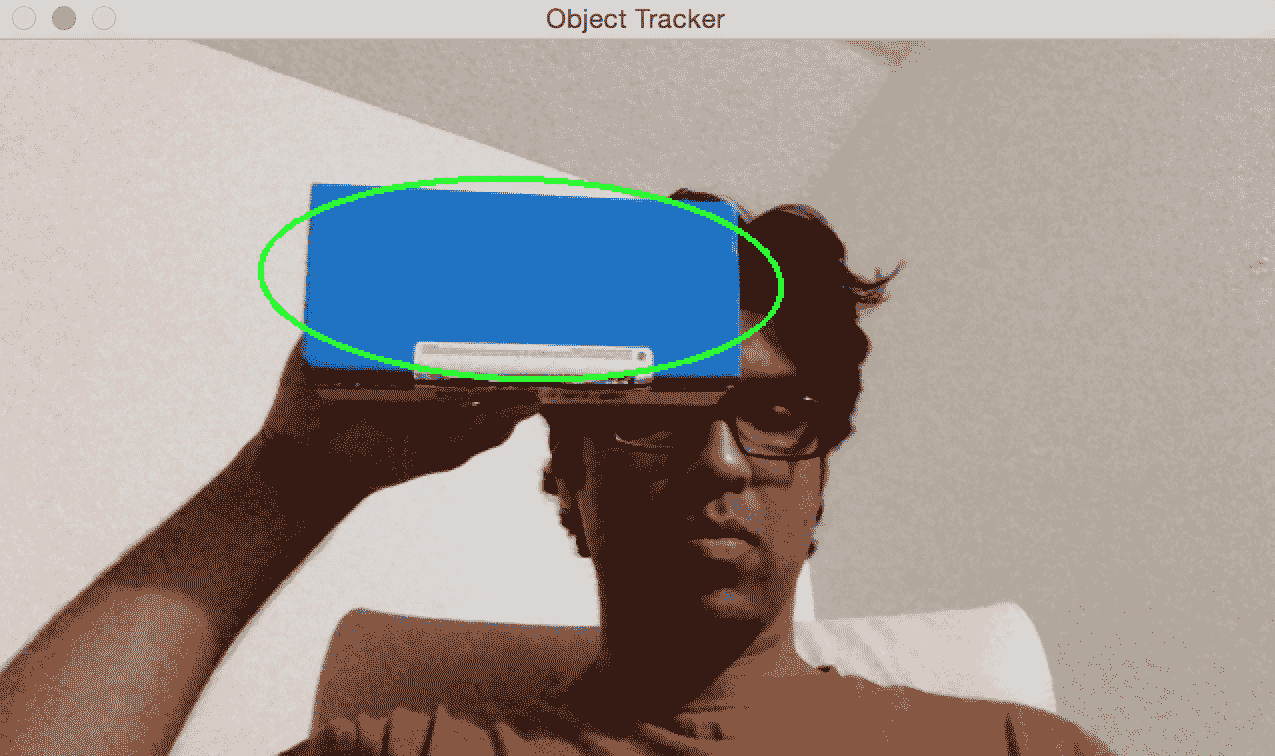
看起来该对象已被很好地跟踪。 让我们更改方向,看看是否保持跟踪:
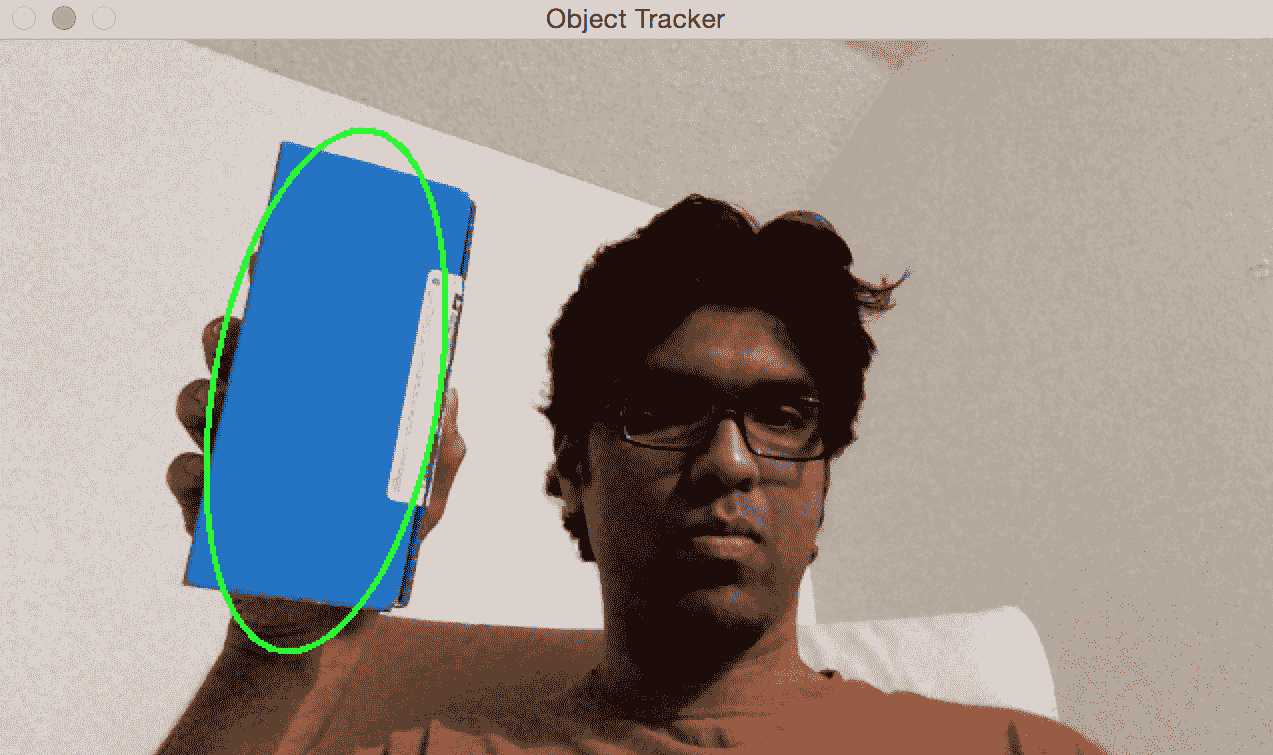
如我们所见,边界椭圆改变了它的位置和方向。 让我们更改对象的视角,看看它是否仍然可以跟踪它:
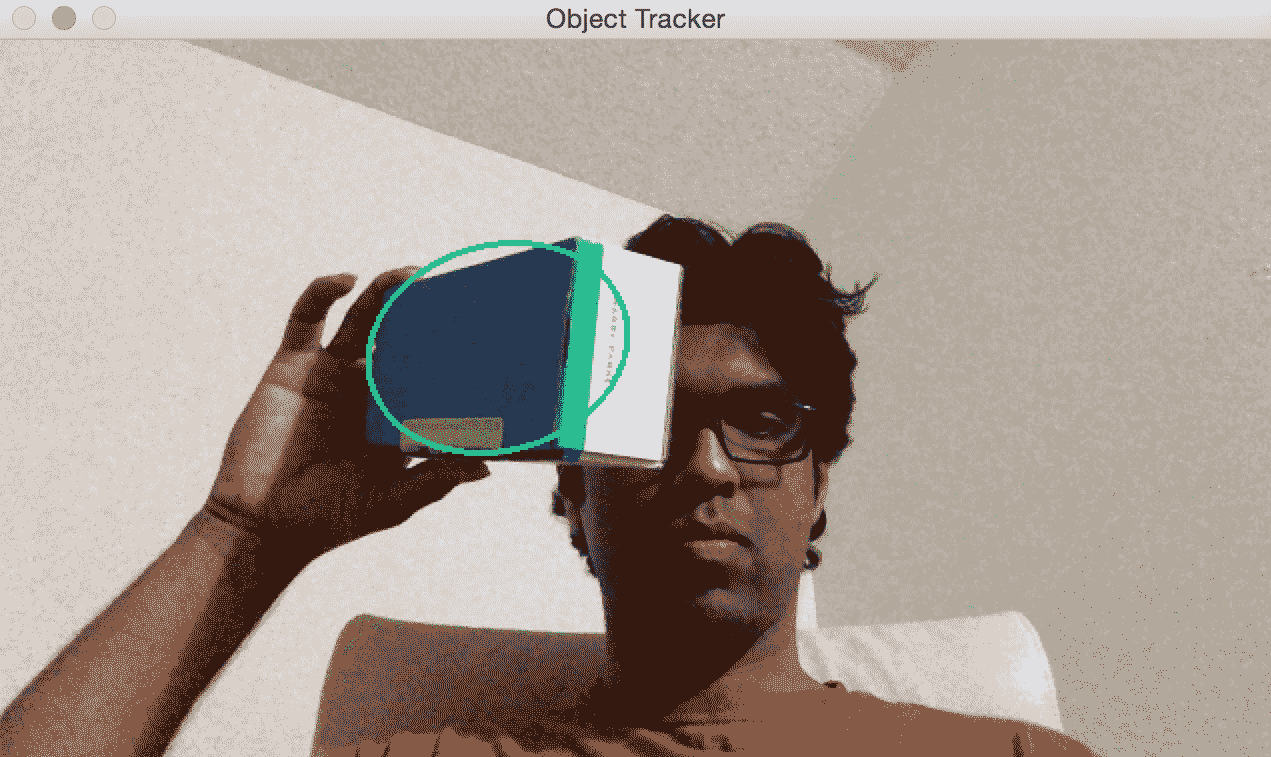
我们还是很好! 边界椭圆更改了宽高比,以反映对象现在看起来偏斜的事实(由于透视变换)。
以下是代码:
import sys
import cv2
import numpy as np
class ObjectTracker():
def __init__(self):
# Initialize the video capture object
# 0 -> indicates that frame should be captured
# from webcam
self.cap = cv2.VideoCapture(0)
# Capture the frame from the webcam
ret, self.frame = self.cap.read()
# Downsampling factor for the input frame
self.scaling_factor = 0.8
self.frame = cv2.resize(self.frame, None, fx=self.scaling_factor, fy=self.scaling_factor, interpolation=cv2.INTER_AREA)
cv2.namedWindow('Object Tracker')
cv2.setMouseCallback('Object Tracker', self.mouse_event)
self.selection = None
self.drag_start = None
self.tracking_state = 0
# Method to track mouse events
def mouse_event(self, event, x, y, flags, param):
x, y = np.int16([x, y])
# Detecting the mouse button down event
if event == cv2.EVENT_LBUTTONDOWN:
self.drag_start = (x, y)
self.tracking_state = 0
if self.drag_start:
if event == cv2.EVENT_MOUSEMOVE:
h, w = self.frame.shape[:2]
xo, yo = self.drag_start
x0, y0 = np.maximum(0, np.minimum([xo, yo], [x, y]))
x1, y1 = np.minimum([w, h], np.maximum([xo, yo], [x, y]))
self.selection = None
if x1-x0 > 0 and y1-y0 > 0:
self.selection = (x0, y0, x1, y1)
elif event == cv2.EVENT_LBUTTONUP:
self.drag_start = None
if self.selection is not None:
self.tracking_state = 1
# Method to start tracking the object
def start_tracking(self):
# Iterate until the user presses the Esc key
while True:
# Capture the frame from webcam
ret, self.frame = self.cap.read()
# Resize the input frame
self.frame = cv2.resize(self.frame, None, fx=self.scaling_factor, fy=self.scaling_factor, interpolation=cv2.INTER_AREA)
vis = self.frame.copy()
# Convert to HSV color space
hsv = cv2.cvtColor(self.frame, cv2.COLOR_BGR2HSV)
# Create the mask based on predefined thresholds.
mask = cv2.inRange(hsv, np.array((0., 60., 32.)), np.array((180., 255., 255.)))
if self.selection:
x0, y0, x1, y1 = self.selection
self.track_window = (x0, y0, x1-x0, y1-y0)
hsv_roi = hsv[y0:y1, x0:x1]
mask_roi = mask[y0:y1, x0:x1]
# Compute the histogram
hist = cv2.calcHist( [hsv_roi], [0], mask_roi, [16], [0, 180] )
# Normalize and reshape the histogram
cv2.normalize(hist, hist, 0, 255, cv2.NORM_MINMAX);
self.hist = hist.reshape(-1)
vis_roi = vis[y0:y1, x0:x1]
cv2.bitwise_not(vis_roi, vis_roi)
vis[mask == 0] = 0
if self.tracking_state == 1:
self.selection = None
# Compute the histogram back projection
prob = cv2.calcBackProject([hsv], [0], self.hist, [0, 180], 1)
prob &= mask
term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1 )
# Apply CAMShift on 'prob'
track_box, self.track_window = cv2.CamShift(prob, self.track_window, term_crit)
# Draw an ellipse around the object
cv2.ellipse(vis, track_box, (0, 255, 0), 2)
cv2.imshow('Object Tracker', vis)
c = cv2.waitKey(delay=5)
if c == 27:
break
cv2.destroyAllWindows()
if __name__ == '__main__':
ObjectTracker().start_tracking()
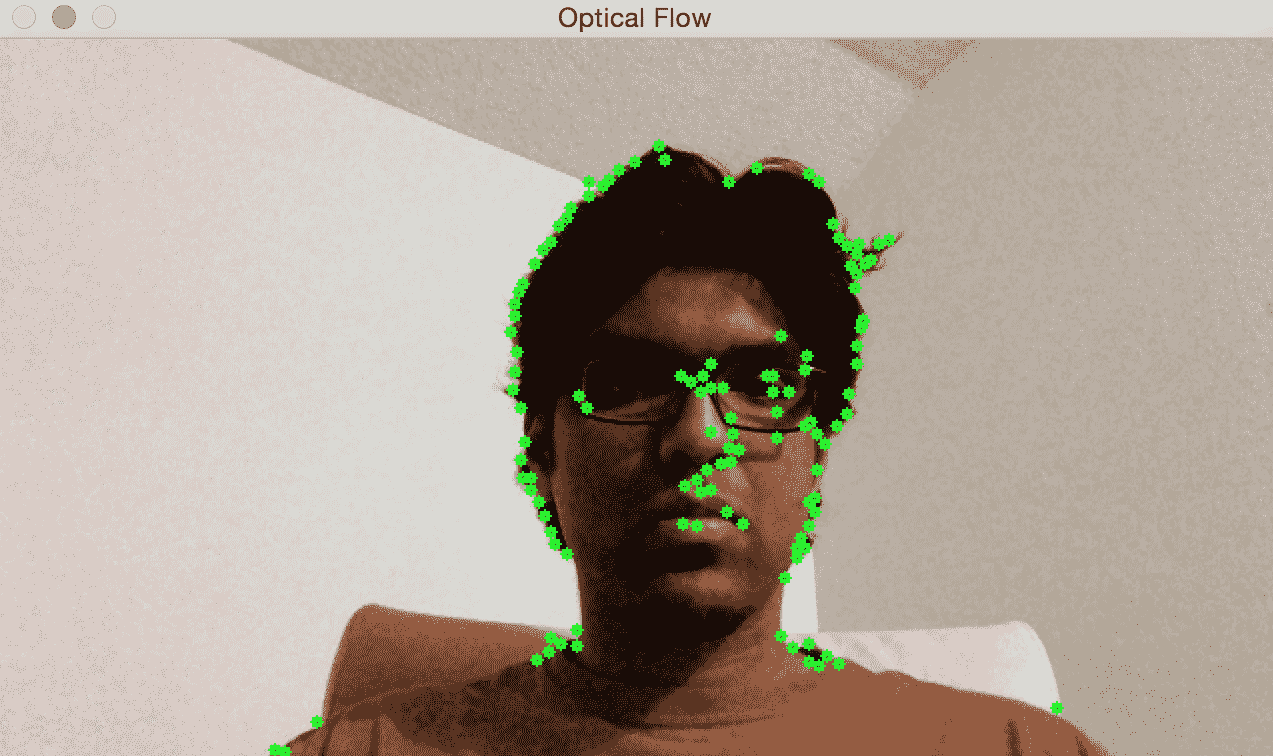
基于特征的跟踪
基于特征的跟踪是指跟踪视频中连续帧中的各个特征点。 我们使用一种称为光流的技术来跟踪这些特征。 光流是计算机视觉中最流行的技术之一。 我们选择了一堆特征点并通过视频流对其进行跟踪。
当我们检测到特征点时,我们将计算位移向量并显示这些关键点在连续帧之间的运动。 这些向量称为运动向量。 有很多方法可以做到这一点,但是卢卡斯-卡纳德方法也许是所有这些方法中最流行的方法。 您可以在 OpenCV 官方文档中了解更多信息。
我们通过提取特征点开始该过程。 对于每个特征点,我们以特征点为中心创建3x3色块。 这里的假设是每个面片内的所有点都将具有相似的运动。 我们可以根据眼前的问题来调整此窗口的大小。
对于当前帧中的每个特征点,我们将周围的3x3面片作为参考点。 对于此补丁,我们在前一帧中查看其邻域以获得最佳匹配。 该邻域通常大于3x3,因为我们要获取最接近所考虑补丁的补丁。 现在,从前一帧中匹配的补丁的中心像素到当前帧中正在考虑的补丁的中心像素的路径将成为运动向量。 我们对所有特征点都这样做,并提取所有运动向量。
让我们考虑以下框架:
如果我沿水平方向移动,您将看到沿水平方向的运动向量:
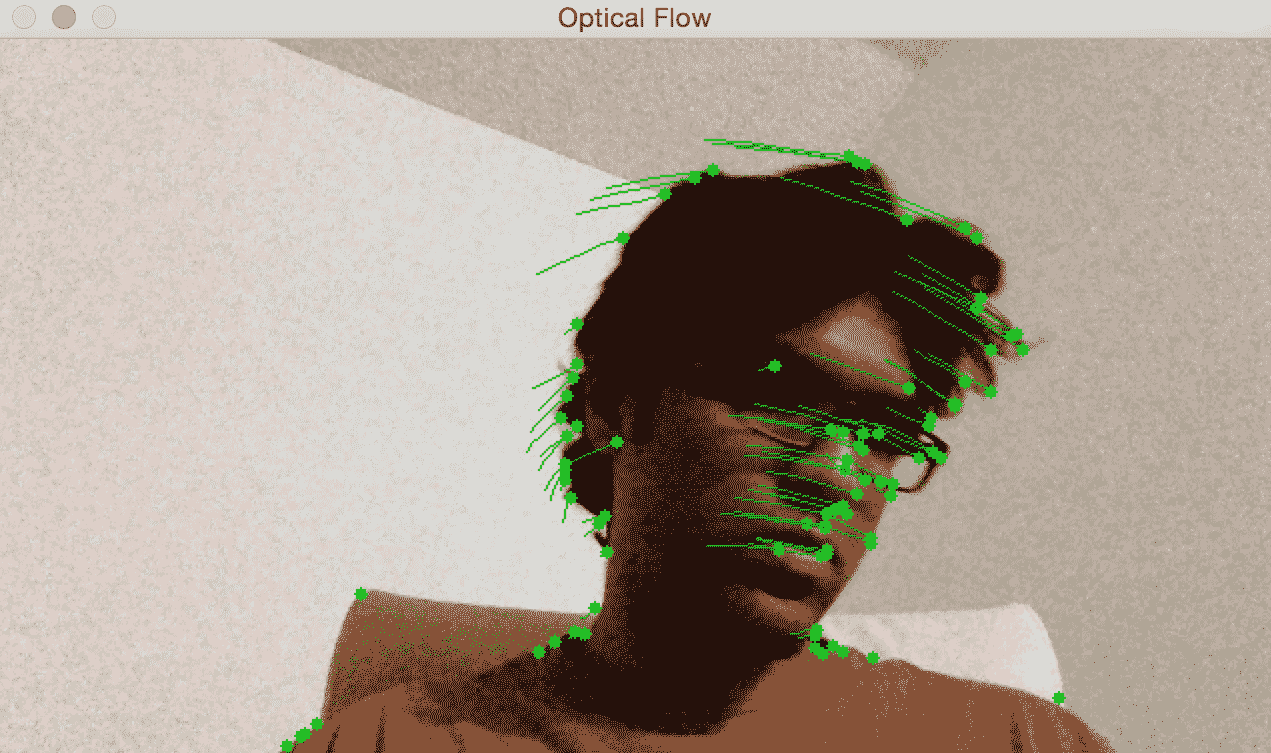
如果我离开网络摄像头,您将看到以下内容:

首先,我们将实现一个函数,以从给定图像中提取特征点,以使用前一帧获取运动向量:
def compute_feature_points(tracking_paths, prev_img, current_img):
feature_points = [tp[-1] for tp in tracking_paths]
# Vector of 2D points for which the flow needs to be found
feature_points_0 = np.float32(feature_points).reshape(-1, 1, 2)
feature_points_1, status_1, err_1 = cv2.calcOpticalFlowPyrLK(prev_img, current_img, \
feature_points_0, None, **tracking_params)
feature_points_0_rev, status_2, err_2 = cv2.calcOpticalFlowPyrLK(current_img, prev_img, \
feature_points_1, None, **tracking_params)
# Compute the difference of the feature points
diff_feature_points = abs(feature_points_0-feature_points_0_rev).reshape(-1, 2).max(-1)
# threshold and keep only the good points
good_points = diff_feature_points < 1
return feature_points_1.reshape(-1, 2), good_points
现在,我们可以实现一种跟踪方法,其中给定获得的兴趣区域,并基于通过上述方法获得的特征点,我们可以显示运动向量(跟踪路径):
# Extract area of interest based on the tracking_paths
# In case there is none, entire frame is used
def calculate_region_of_interest(frame, tracking_paths):
mask = np.zeros_like(frame)
mask[:] = 255
for x, y in [np.int32(tp[-1]) for tp in tracking_paths]:
cv2.circle(mask, (x, y), 6, 0, -1)
return mask
def add_tracking_paths(frame, tracking_paths):
mask = calculate_region_of_interest(frame, tracking_paths)
# Extract good features to track. You can learn more
# about the parameters here: http://goo.gl/BI2Kml
feature_points = cv2.goodFeaturesToTrack(frame, mask = mask, maxCorners = 500, \
qualityLevel = 0.3, minDistance = 7, blockSize = 7)
if feature_points is not None:
for x, y in np.float32(feature_points).reshape(-1, 2):
tracking_paths.append([(x, y)])
def start_tracking(cap, scaling_factor, num_frames_to_track, num_frames_jump, tracking_params):
tracking_paths = []
frame_index = 0
# Iterate until the user presses the ESC key
while True:
# read the input frame
ret, frame = cap.read()
# downsample the input frame
frame = cv2.resize(frame, None, fx=scaling_factor, fy=scaling_factor, \ interpolation=cv2.INTER_AREA)
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
output_img = frame.copy()
if len(tracking_paths) > 0:
prev_img, current_img = prev_gray, frame_gray
# Compute feature points using optical flow. You can
# refer to the documentation to learn more about the
# parameters here: http://goo.gl/t6P4SE
feature_points, good_points = compute_feature_points(tracking_paths, \
prev_img, current_img)
new_tracking_paths = []
for tp, (x, y), good_points_flag in \
zip(tracking_paths, feature_points, good_points):
if not good_points_flag: continue
tp.append((x, y))
# Using the queue structure i.e. first in, first out
if len(tp) > num_frames_to_track: del tp[0]
new_tracking_paths.append(tp)
# draw green circles on top of the output image
cv2.circle(output_img, (x, y), 3, (0, 255, 0), -1)
tracking_paths = new_tracking_paths
# draw green lines on top of the output image
point_paths = [np.int32(tp) for tp in tracking_paths]
cv2.polylines(output_img, point_paths, False, (0, 150, 0))
# 'if' condition to skip every 'n'th frame
if not frame_index % num_frames_jump:
add_tracking_paths(frame_gray, tracking_paths)
frame_index += 1
prev_gray = frame_gray
cv2.imshow('Optical Flow', output_img)
# Check if the user pressed the ESC key
c = cv2.waitKey(1)
if c == 27:
break
这是使用上面的代码执行基于光流的跟踪:
import cv2
import numpy as np
if __name__ == '__main__':
# Capture the input frame
cap = cv2.VideoCapture(1)
# Downsampling factor for the image
scaling_factor = 0.5
# Number of frames to keep in the buffer when you
# are tracking. If you increase this number,
# feature points will have more "inertia"
num_frames_to_track = 5
# Skip every 'n' frames. This is just to increase the speed.
num_frames_jump = 2
# 'winSize' refers to the size of each patch. These patches
# are the smallest blocks on which we operate and track
# the feature points. You can read more about the parameters
# here: http://goo.gl/ulwqLk
tracking_params = dict(winSize = (11, 11), maxLevel = 2, \
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
start_tracking(cap, scaling_factor, num_frames_to_track, \
num_frames_jump, tracking_params)
cv2.destroyAllWindows()
因此,如果您想玩转它,可以让用户在输入视频中选择兴趣区域(就像我们之前所做的那样)。 然后,您可以从该兴趣区域提取特征点,并通过绘制边界框来跟踪对象。 这将是一个有趣的练习!
背景减法
背景减法在视频监视中非常有用。 基本上,背景减法技术在必须检测静态场景中的运动物体的情况下表现非常好。 顾名思义,该算法通过检测背景并将其从当前帧中减去以获取前景(即运动对象)来工作。
为了检测运动物体,我们需要首先建立背景模型。 这与帧差异不同,因为我们实际上是在对背景建模并使用此模型来检测运动对象。 因此,这比简单的帧差分技术要好得多。 该技术尝试检测场景中的静态部分,然后将其包括在背景模型中。 因此,这是一种自适应技术,可以根据场景进行调整。
让我们考虑下图:
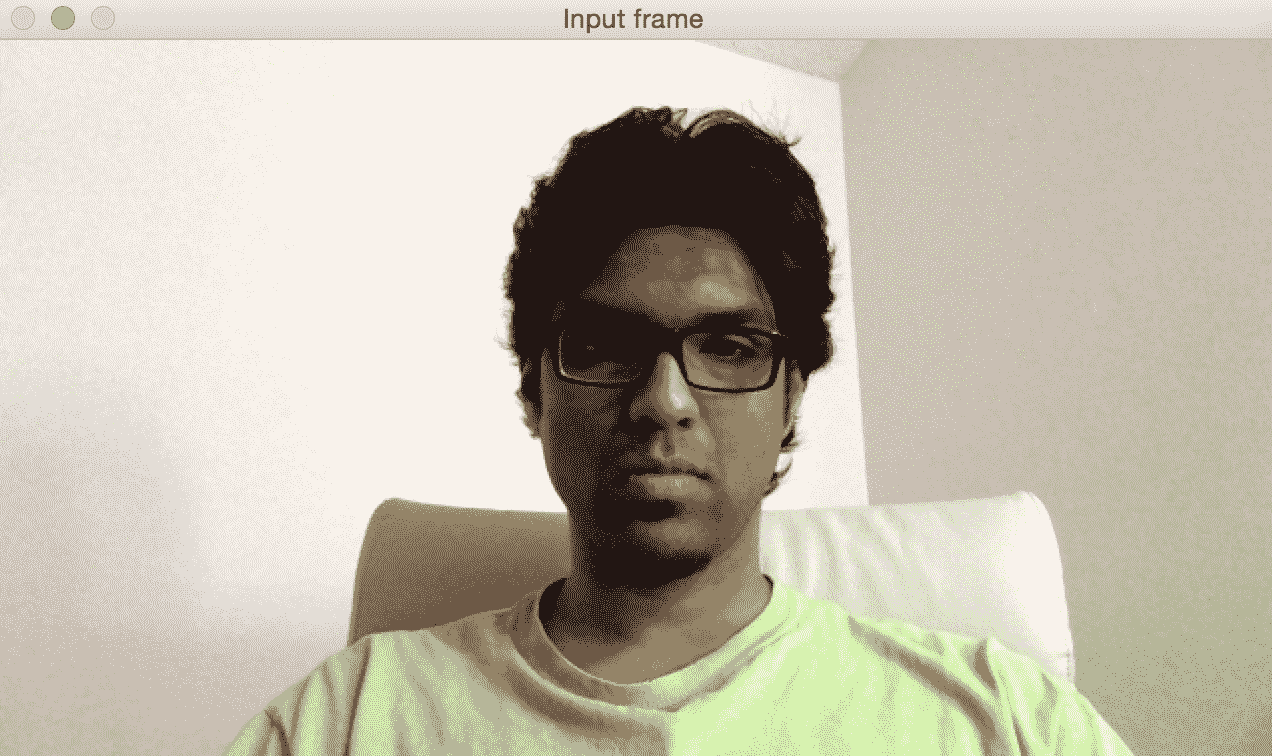
现在,当我们在该场景中收集更多帧时,图像的每个部分将逐渐成为背景模型的一部分。 这也是我们前面讨论的内容。 如果场景是静态的,则模型会进行自我调整以确保更新了背景模型。 一开始就是这样:
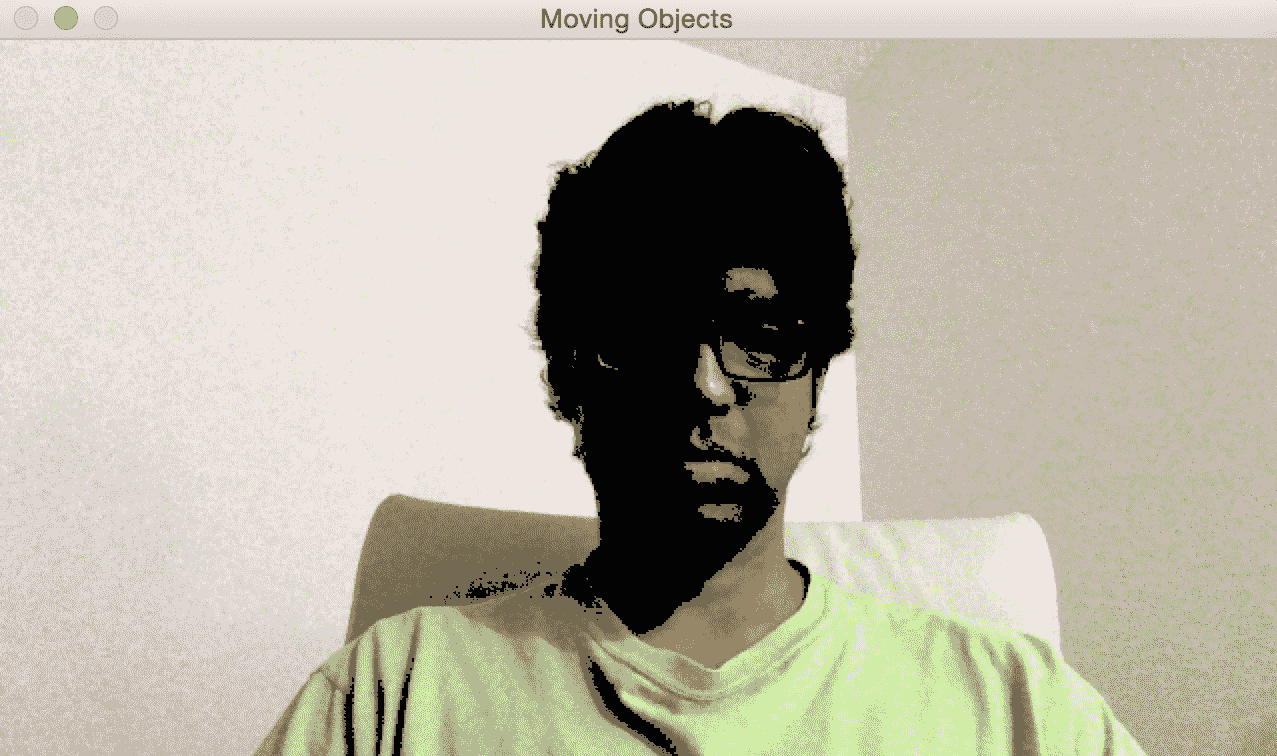
请注意,我的脸部如何已成为背景模型(变黑区域)的一部分。 以下屏幕截图显示了几秒钟后我们将看到的内容。 如果我们继续前进,一切最终都会成为背景模型的一部分:
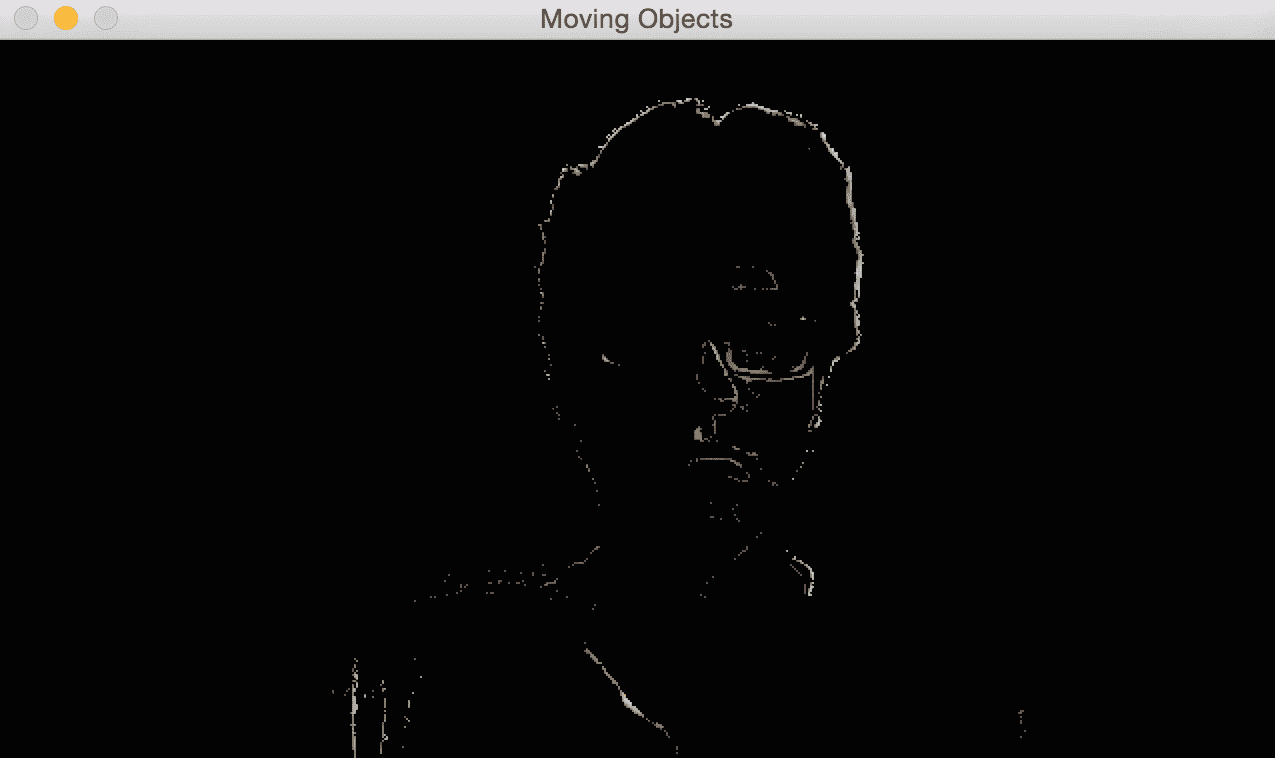
现在,如果我们引入一个新的运动对象,则将清晰地检测到它,如下所示:
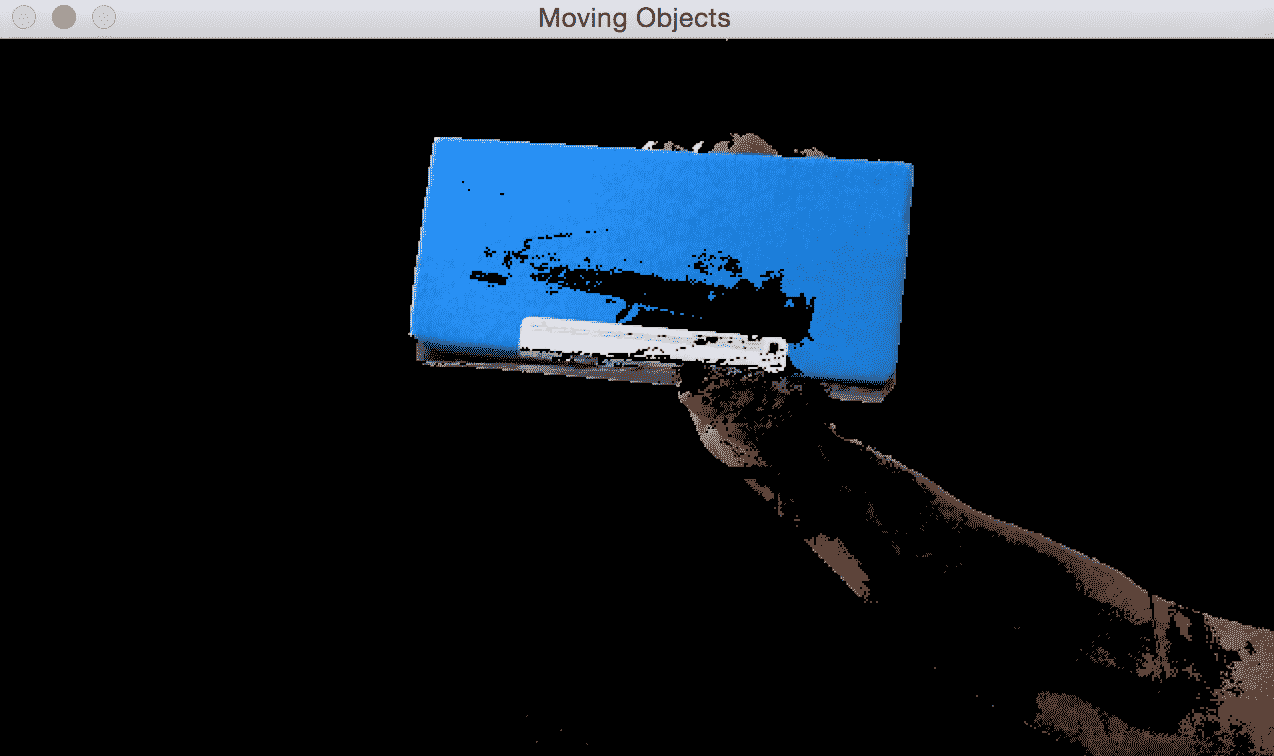
这是执行此操作的代码:
import cv2
import numpy as np
# Capture the input frame
def get_frame(cap, scaling_factor=0.5):
ret, frame = cap.read()
# Resize the frame
frame = cv2.resize(frame, None, fx=scaling_factor,
fy=scaling_factor, interpolation=cv2.INTER_AREA)
return frame
if __name__=='__main__':
# Initialize the video capture object
cap = cv2.VideoCapture(1)
# Create the background subtractor object
bgSubtractor = cv2.createBackgroundSubtractorMOG2()
# This factor controls the learning rate of the algorithm.
# The learning rate refers to the rate at which your model
# will learn about the background. Higher value for
# 'history' indicates a slower learning rate. You
# can play with this parameter to see how it affects
# the output.
history = 100
# Iterate until the user presses the ESC key
while True:
frame = get_frame(cap, 0.5)
# Apply the background subtraction model to the input frame
mask = bgSubtractor.apply(frame, learningRate=1.0/history)
# Convert from grayscale to 3-channel RGB
mask = cv2.cvtColor(mask, cv2.COLOR_GRAY2BGR)
cv2.imshow('Input frame', frame)
cv2.imshow('Moving Objects MOG', mask & frame)
# Check if the user pressed the ESC key
c = cv2.waitKey(delay=30)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()
在前面的示例中,我们使用了称为BackgroundSubtractorMOG的背景减法,这是一种基于高斯混合的背景/前景分割算法。 在该算法中,每个背景像素都放入一个矩阵中,并通过应用高斯分布进行混合。 每种颜色都会获得一个权重,以代表它们停留在场景中的时间; 这样,将保持静态的颜色用于定义背景:
if __name__=='__main__':
# Initialize the video capture object
cap = cv2.VideoCapture(1)
# Create the background subtractor object
bgSubtractor= cv2.bgsegm.createBackgroundSubtractorGMG()
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, ksize=(3,3))
# Iterate until the user presses the ESC key
while True:
frame = get_frame(cap, 0.5)
# Apply the background subtraction model to the input frame
mask = bgSubtractor.apply(frame)
# Removing noise from background
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel)
cv2.imshow('Input frame', frame)
cv2.imshow('Moving Objects', mask)
# Check if the user pressed the ESC key
c = cv2.waitKey(delay=30)
if c == 27:
break
cap.release()
cv2.destroyAllWindows()
还有其他选择可能会更好。 例如,去除图像噪声,这是BackgroundSubtractorGMG的情况。 如果您想进一步了解它们,请访问这个页面。
总结
在本章中,我们学习了对象跟踪。 我们学习了如何使用帧差分获得运动信息,以及当我们要跟踪不同类型的对象时如何限制运动信息。 我们了解了色彩空间阈值及其如何用于跟踪彩色对象的知识。 我们讨论了用于对象跟踪的聚类技术,以及如何使用 CAMShift 算法构建交互式的对象跟踪器。 我们讨论了如何跟踪视频中的特征,以及如何使用光流来实现相同功能。 我们了解了背景减法及其如何用于视频监控。
在下一章中,我们将讨论对象识别以及如何构建视觉搜索引擎。
