十、创建全景图像
在本章中,我们将学习如何将同一场景的多个图像拼接在一起以创建全景图像。
在本章结束时,您将了解:
- 如何在多个图像之间匹配关键点描述符
- 如何找到图像之间的重叠区域
- 如何基于匹配的关键点使图像变形
- 如何拼接多张图像以创建全景图像
用于匹配的关键点描述符
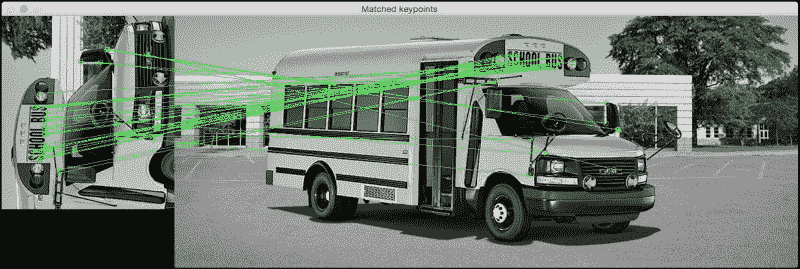
在上一章中,我们学习了如何使用各种方法来提取关键点。 之所以提取关键点,是因为我们可以将它们用于图像匹配。 让我们考虑下图:

如您所见,这是一辆校车的照片。 现在,让我们看一下下图:

前面的图像是校车图像的一部分,并且已逆时针旋转了 90 度。 我们很容易认识到这一点,因为我们的大脑对缩放和旋转保持不变。 我们的目标是在这两个图像之间找到匹配点。 如果这样做,它将看起来像这样:
以下是执行此操作的代码:
import sys
import cv2
import numpy as np
def draw_matches(img1, keypoints1, img2, keypoints2, matches):
rows1, cols1 = img1.shape[:2]
rows2, cols2 = img2.shape[:2]
# Create a new output image that concatenates the two images together
output_img = np.zeros((max([rows1,rows2]), cols1+cols2, 3), dtype='uint8')
output_img[:rows1, :cols1, :] = np.dstack([img1, img1, img1])
output_img[:rows2, cols1:cols1+cols2, :] = np.dstack([img2, img2, img2])
# Draw connecting lines between matching keypoints
for match in matches:
# Get the matching keypoints for each of the images
img1_idx = match.queryIdx
img2_idx = match.trainIdx
(x1, y1) = keypoints1[img1_idx].pt
(x2, y2) = keypoints2[img2_idx].pt
# Draw a small circle at both co-ordinates and then draw a line
radius = 4
colour = (0,255,0) # green
thickness = 1
cv2.circle(output_img, (int(x1),int(y1)), radius, colour, thickness)
cv2.circle(output_img, (int(x2)+cols1,int(y2)), radius, colour, thickness)
cv2.line(output_img, (int(x1),int(y1)), (int(x2)+cols1,int(y2)), colour, thickness)
return output_img
if __name__=='__main__':
img1 = cv2.imread(sys.argv[1], 0) # query image (rotated subregion)
img2 = cv2.imread(sys.argv[2], 0) # train image (full image)
# Initialize ORB detector
orb = cv2.ORB()
# Extract keypoints and descriptors
keypoints1, descriptors1 = orb.detectAndCompute(img1, None)
keypoints2, descriptors2 = orb.detectAndCompute(img2, None)
# Create Brute Force matcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# Match descriptors
matches = bf.match(descriptors1, descriptors2)
# Sort them in the order of their distance
matches = sorted(matches, key = lambda x:x.distance)
# Draw first 'n' matches
img3 = draw_matches(img1, keypoints1, img2, keypoints2, matches[:30])
cv2.imshow('Matched keypoints', img3)
cv2.waitKey()
我们如何匹配关键点?
在前面的代码中,我们使用 ORB 检测器提取关键点。 提取关键点后,便使用了暴力匹配器来匹配描述符。 暴力匹配非常简单! 对于第一张图片中的每个描述符,我们将其与第二张图片中的每个描述符进行匹配,并采用最接近的一个。 为了计算最接近的描述符,我们使用汉明距离作为度量标准,如以下行所示:
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
您可以在这个页面上了解有关汉明距离的更多信息。 前一行的第二个参数是布尔变量。 如果为真,则匹配器仅返回在两个方向上彼此最接近的那些关键点。 这意味着如果获得(i, j)作为匹配项,则可以确保第一张图像中的第i个描述符具有第二张图像中的第j个描述符作为其最接近的匹配,反之亦然。 这增加了描述符匹配的一致性和鲁棒性。
了解匹配器对象
让我们再次考虑下面的行:
matches = bf.match(descriptors1, descriptors2)
在这里,变量match是DMatch对象的列表。 您可以在 OpenCV 文档中阅读有关它的更多信息。 我们只需要快速理解它的含义,因为它在以后的章节中将变得越来越重要。 如果我们要遍历此DMatch对象列表,则每个项目将具有以下属性:
item.distance:此属性为我们提供了描述符之间的距离。 距离越短表示匹配越好。item.trainIdx:此属性为我们提供了训练描述符列表中描述符的索引(在我们的情况下,它是完整图像中描述符的列表)。item.queryIdx:此属性为我们提供了查询描述符列表中描述符的索引(在我们的情况下,这是旋转子图像中的描述符列表)。item.imgIdx:此属性为我们提供训练图像的索引。
绘制匹配的关键点
现在我们知道如何访问匹配器对象的不同属性,让我们看看如何使用它们绘制匹配的关键点。 OpenCV 3.0 提供了直接功能来绘制匹配的关键点,但是我们不会使用它。 最好窥视一下内部,看看下面发生了什么。
我们需要创建一个大输出图像,使其可以同时适合两个图像。 因此,我们在以下行中执行此操作:
output_img = np.zeros((max([rows1,rows2]), cols1+cols2, 3), dtype='uint8')
正如我们在这里看到的,行数设置为两个值中的较大者,列数只是两个值的总和。 对于匹配项列表中的每个项目,我们都提取匹配关键点的位置,如以下几行所示:
(x1, y1) = keypoints1[img1_idx].pt
(x2, y2) = keypoints2[img2_idx].pt
完成此操作后,我们只需在这些点上绘制来指示其位置,然后绘制一条连接这两个点的线。
创建全景图像
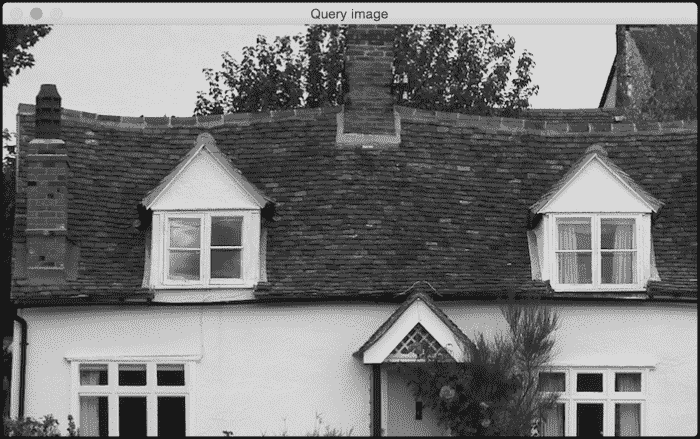
现在我们知道了如何匹配关键点,让我们继续前进,看看如何将多个图像拼接在一起。 考虑下图:
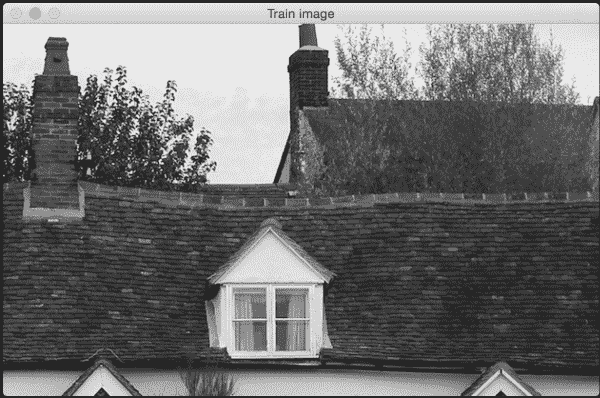
假设我们要将下面的图像与前面的图像拼接在一起:
如果我们缝合这些图像,它将看起来类似于以下图像:

现在让我们说捕获了房子的另一部分,如下图所示:

如果我们用之前看到的拼接图像来拼接前面的图像,它将看起来像这样:

我们可以将图像拼接在一起,以创建漂亮的全景图像。 让我们看一下代码:
import sys
import argparse
import cv2
import numpy as np
def argument_parser():
parser = argparse.ArgumentParser(description='Stitch two images together')
parser.add_argument("--query-image", dest="query_image", required=True,
help="First image that needs to be stitched")
parser.add_argument("--train-image", dest="train_image", required=True,
help="Second image that needs to be stitched")
parser.add_argument("--min-match-count", dest="min_match_count", type=int,
required=False, default=10, help="Minimum number of matches required")
return parser
# Warp img2 to img1 using the homography matrix H
def warpImages(img1, img2, H):
rows1, cols1 = img1.shape[:2]
rows2, cols2 = img2.shape[:2]
list_of_points_1 = np.float32([[0,0], [0,rows1], [cols1,rows1], [cols1,0]]).reshape(-1,1,2)
temp_points = np.float32([[0,0], [0,rows2], [cols2,rows2], [cols2,0]]).reshape(-1,1,2)
list_of_points_2 = cv2.perspectiveTransform(temp_points, H)
list_of_points = np.concatenate((list_of_points_1, list_of_points_2), axis=0)
[x_min, y_min] = np.int32(list_of_points.min(axis=0).ravel() - 0.5)
[x_max, y_max] = np.int32(list_of_points.max(axis=0).ravel() + 0.5)
translation_dist = [-x_min,-y_min]
H_translation = np.array([[1, 0, translation_dist[0]], [0, 1, translation_dist[1]], [0,0,1]])
output_img = cv2.warpPerspective(img2, H_translation.dot(H), (x_max-x_min, y_max-y_min))
output_img[translation_dist[1]:rows1+translation_dist[1], translation_dist[0]:cols1+translation_dist[0]] = img1
return output_img
if __name__=='__main__':
args = argument_parser().parse_args()
img1 = cv2.imread(args.query_image, 0)
img2 = cv2.imread(args.train_image, 0)
min_match_count = args.min_match_count
cv2.imshow('Query image', img1)
cv2.imshow('Train image', img2)
# Initialize the SIFT detector
sift = cv2.SIFT()
# Extract the keypoints and descriptors
keypoints1, descriptors1 = sift.detectAndCompute(img1, None)
keypoints2, descriptors2 = sift.detectAndCompute(img2, None)
# Initialize parameters for Flann based matcher
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 50)
# Initialize the Flann based matcher object
flann = cv2.FlannBasedMatcher(index_params, search_params)
# Compute the matches
matches = flann.knnMatch(descriptors1, descriptors2, k=2)
# Store all the good matches as per Lowe's ratio test
good_matches = []
for m1,m2 in matches:
if m1.distance < 0.7*m2.distance:
good_matches.append(m1)
if len(good_matches) > min_match_count:
src_pts = np.float32([ keypoints1[good_match.queryIdx].pt for good_match in good_matches ]).reshape(-1,1,2)
dst_pts = np.float32([ keypoints2[good_match.trainIdx].pt for good_match in good_matches ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
result = warpImages(img2, img1, M)
cv2.imshow('Stitched output', result)
cv2.waitKey()
else:
print "We don't have enough number of matches between the two images."
print "Found only %d matches. We need at least %d matches." % (len(good_matches), min_match_count)
查找重叠区域
这里的目标是找到匹配的关键点,以便我们可以将图像拼接在一起。 因此,第一步是获取这些匹配的关键点。 如上一节所述,我们使用关键点检测器提取关键点,然后使用基于 Flann 的匹配器匹配关键点。
注意
您可以通过这里了解有关 Flann 的更多信息。
基于 Flann 的匹配器比[暴力]匹配要快,因为它不会将每个点与另一个列表中的每个点进行比较。 它仅考虑当前点的邻域来获取匹配的关键点,从而使其更有效。
一旦获得了匹配的关键点列表,就可以使用 Lowe 的比率测试来仅保留强匹配项。 David Lowe 提出了此比率测试,以提高 SIFT 的鲁棒性。
注意
您可以在这个页面了解更多信息。
基本上,当我们匹配关键点时,我们拒绝匹配项,其中到最近邻和第二个最近邻的距离之比大于某个阈值。 这有助于我们丢弃不够清晰的点。 因此,我们在这里使用该概念仅保留良好的匹配项,而忽略其余的匹配项。 如果我们没有足够的比赛,我们不会继续进行。 在我们的例子中,默认值为 10。您可以使用此输入参数来了解它如何影响输出。
如果我们有足够数量的匹配项,那么我们将提取两个图像中的关键点列表,并提取单应性矩阵。 如果您还记得,我们已经在第一章中讨论了单应性。 因此,如果您忘记了它,则可能需要快速浏览一下。 我们基本上从这两个图像中获取一堆点,然后提取变换矩阵。
拼接图像
现在我们有了转换,我们可以继续拼接图像了。 我们将使用变换矩阵来变换第二个点列表。 我们将第一个图像作为参考框架,并创建一个足以容纳两个图像的输出图像。 我们需要提取有关第二张图像变换的信息。 我们需要将其移至该参考框架中,以确保其与第一张图像对齐。 因此,我们必须提取平移信息,然后将其变形。 然后,我们将第一个图像添加到其中,并构建最终输出。 值得一提的是,这也适用于具有不同宽高比的图像。 因此,如果有机会,请尝试一下,看看输出结果如何。
如果图像彼此成角度怎么办?
直到现在,我们都在查看同一平面上的图像。 拼接这些图像非常简单,我们无需处理任何伪像。 在现实生活中,您无法在完全相同的平面上捕获多个图像。 当捕获同一场景的多个图像时,势必会倾斜相机并更改平面。 所以问题是,我们的算法在那种情况下会起作用吗? 事实证明,它也可以处理这些情况。
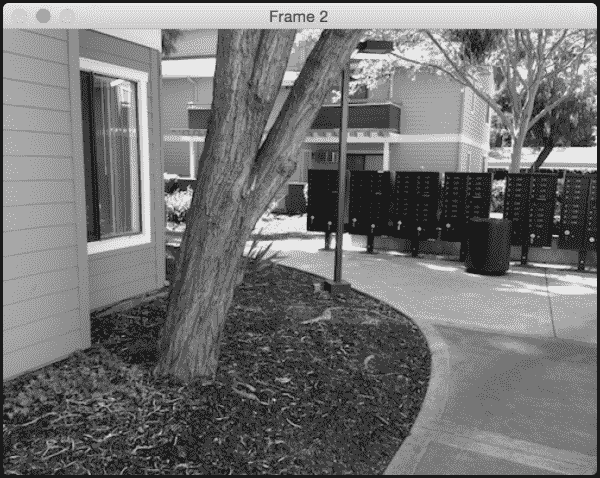
让我们考虑下图:
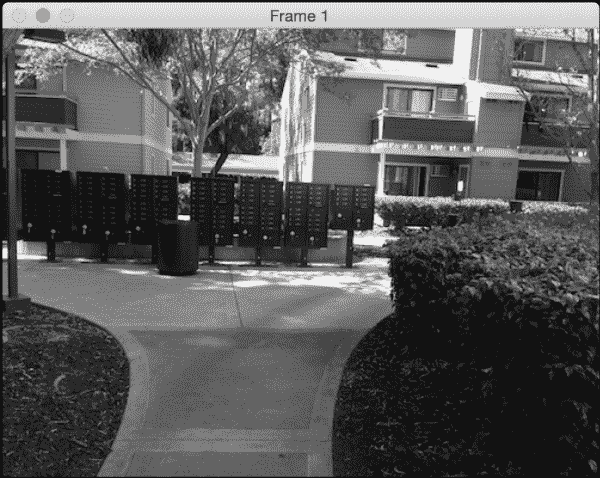
现在,让我们考虑同一场景的另一幅图像。 它与第一个图像成一定角度,并且也部分重叠:
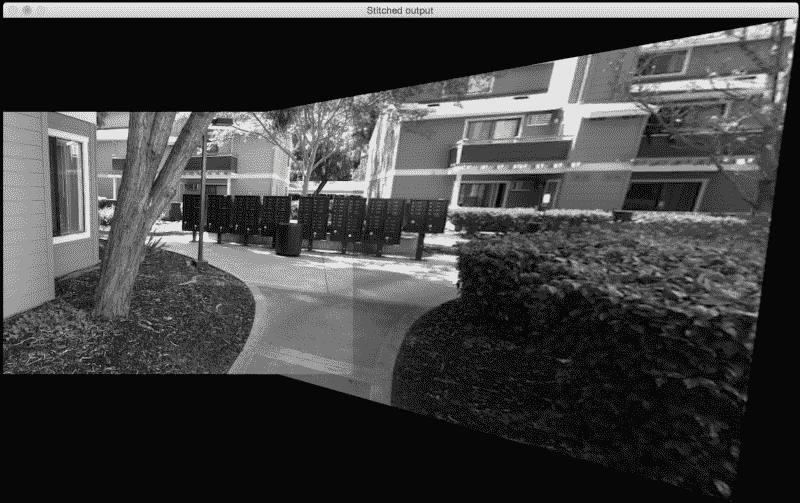
让我们以第一张图像作为参考。 如果我们使用算法拼接这些图像,它将看起来像这样:
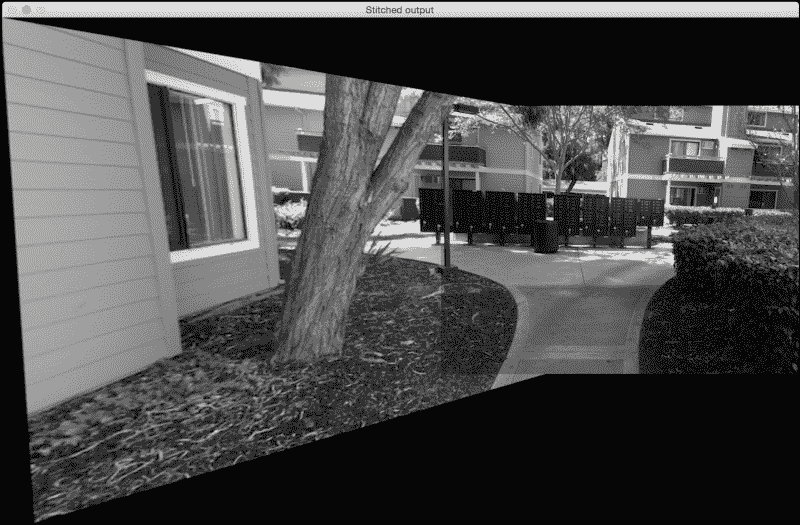
如果我们将第二张图像作为参考,它将看起来像这样:
为什么看起来很拉伸?
如果您观察到,则输出图像的与查询图像相对应的部分看起来被拉伸了。 这是因为查询图像已经过转换和调整以适合我们的参考框架。 它看起来很冗长的原因是因为我们的代码中包含以下几行:
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
result = warpImages(img2, img1, M)
由于图像相对于彼此成一定角度,因此查询图像将必须进行透视变换,以适合参考框架。 因此,我们首先转换查询图像,然后将其缝合到我们的主图像中以形成全景图像。
总结
在本章中,我们学习了如何在多个图像之间匹配关键点。 我们讨论了如何将多个图像拼接在一起以创建全景图像。 我们学习了如何处理不在同一平面上的图像。
在下一章中,我们将讨论如何通过检测图像中的“有趣”区域来进行内容感知的图像大小调整。
