二、检测边缘并应用图像过滤器
在本章中,我们将了解如何将酷炫的视觉效果应用于图像。 我们将学习如何使用基本的图像处理运算符,讨论边缘检测,以及如何使用图像过滤器将各种效果应用于照片。
在本章结束时,您将了解:
- 什么是 2D 卷积以及如何使用
- 如何模糊图像
- 如何检测图像边缘
- 如何将运动模糊应用于图像
- 如何锐化和浮雕图像
- 如何腐蚀和扩大图像
- 如何创建晕影过滤器
- 如何增强图像对比度
2D 卷积
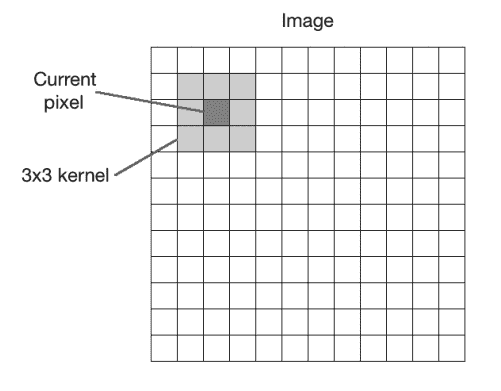
卷积是图像处理中的基本操作。 我们基本上将数学运算符应用于每个像素,并以某种方式更改其值。 为了应用该数学运算符,我们使用另一个称为核的矩阵。 核的大小通常比输入图像小得多。 对于图像中的每个像素,我们将核放在顶部,以使核的中心与所考虑的像素重合。 然后,我们将核矩阵中的每个值与图像中的相应值相乘,然后将其求和。 这是将应用于输出图像中该位置的新值。
在这里,核称为图像过滤器,而将此核应用于给定图像的过程称为图像过滤。 将核应用于图像后获得的输出称为滤波图像。 根据核中的值,它执行不同的功能,例如模糊,检测边缘等。 下图应帮助您可视化图像过滤操作:
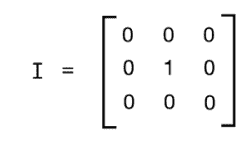
让我们从最简单的情况开始,即身份核。 这个核并没有真正改变输入图像。 如果我们考虑一个3x3身份核,它看起来类似于以下内容:
模糊化
模糊是指对邻域内的像素值求平均。 这也称为低通过滤器。 低通过滤器是允许低频并阻止高频的过滤器。 现在,我们想到的下一个问题是:频率在图像中意味着什么? 嗯,在这种情况下,频率是指像素值的变化率。 因此,可以说尖锐的边缘将是高频内容,因为像素值在该区域中快速变化。 按照这种逻辑,平原区域将是低频内容。 按照这个定义,低通过滤器将尝试平滑边缘。
构造低通过滤器的一种简单方法是均匀地平均像素附近的值。 我们可以根据要平滑图像的程度来选择核的大小,并且相应地会有不同的效果。 如果您选择更大的尺寸,那么您将在更大的区域进行平均。 这趋于增加平滑效果。 让我们看一下3x3低通过滤器核的样子:
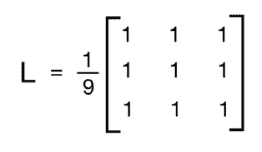
我们将矩阵除以 9,因为我们希望这些值的总和为 1。 这称为归一化,这一点很重要,因为我们不想人为地增加该像素位置的强度值。 因此,您应该在将核应用于图像之前对其进行规范化。 规范化是一个非常重要的概念,它在多种情况下都可以使用,因此您应该在线阅读一些教程以很好地了解它。
这是将低通过滤器应用于图像的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
rows, cols = img.shape[:2]
kernel_identity = np.array([[0,0,0], [0,1,0], [0,0,0]])
kernel_3x3 = np.ones((3,3), np.float32) / 9.0 # Divide by 9 to normalize the kernel
kernel_5x5 = np.ones((5,5), np.float32) / 25.0 # Divide by 25 to normalize the kernel
cv2.imshow('Original', img)
# value -1 is to maintain source image depth
output = cv2.filter2D(img, -1, kernel_identity) cv2.imshow('Identity filter', output)
output = cv2.filter2D(img, -1, kernel_3x3)
cv2.imshow('3x3 filter', output)
output = cv2.filter2D(img, -1, kernel_5x5)
cv2.imshow('5x5 filter', output)
cv2.waitKey(0)
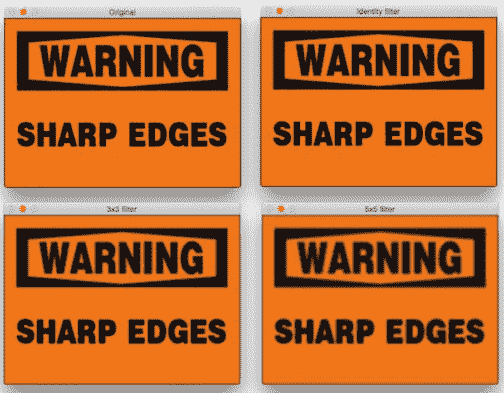
如果运行前面的代码,您将看到类似以下内容:
核大小与模糊
在前面的代码中,我们在代码中生成了kernel_identity,kernel_3x3和kernel_5x5不同的核。 我们使用filter2D函数将这些核应用于输入图像。 如果仔细查看图像,您会发现随着我们增加核大小,它们会变得越来越模糊。 其原因是因为当我们增加核大小时,我们在更大的区域进行平均。 这往往具有较大的模糊效果。
另一种执行此操作的方法是使用 OpenCV 函数blur。 如果您不想自己生成核,则可以直接使用此函数。 我们可以使用以下代码行来调用它:
output = cv2.blur(img, (3,3))
这会将3x3核应用于输入,并直接为您提供输出。
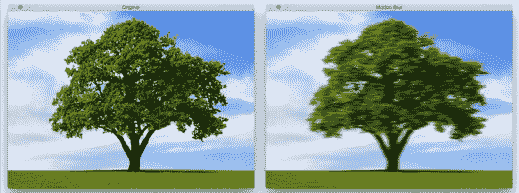
运动模糊
当我们应用运动模糊效果时,看起来就像是您沿特定方向移动时捕获的图片。 例如,您可以使图像看起来像是从行驶中的汽车上捕获的。
输入和输出图像将类似于以下图像:
以下是实现这种运动模糊效果的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
cv2.imshow('Original', img)
size = 15
# generating the kernel
kernel_motion_blur = np.zeros((size, size))
kernel_motion_blur[int((size-1)/2), :] = np.ones(size)
kernel_motion_blur = kernel_motion_blur / size
# applying the kernel to the input image
output = cv2.filter2D(img, -1, kernel_motion_blur)
cv2.imshow('Motion Blur', output)
cv2.waitKey(0)
底层原理
我们正在照常读取图像。 然后,我们正在构建运动blur核。 运动模糊核会在特定方向上平均像素值。 就像定向低通过滤器。 3x3水平运动模糊核看起来像这样:
这将使图像在水平方向上模糊。 您可以选择任何方向,它将相应地起作用。 模糊的数量将取决于核的大小。 因此,如果要使图像模糊,只需为核选择更大的尺寸即可。 为了看到全部效果,我们在前面的代码中采用了15x15核。 然后,我们使用filter2D将此核应用于输入图像,以获得运动模糊的输出。
锐化
应用锐化过滤器将锐化图像中的边缘。 当我们要增强不够清晰的图像边缘时,此过滤器非常有用。 以下是一些图像,可让您大致了解图像锐化过程的外观:

如上图所示,锐化程度取决于我们使用的核类型。 我们在这里可以自由定制核,每个核都会给您一种不同的锐化方法。 要像在上一张图片的右上角图像中那样锐化图像,我们将使用这样的核:
如果要进行过度锐化,如左下图所示,我们将使用以下核:
但是,这两个核的问题在于输出图像看起来是人为增强的。 如果我们希望图像看起来更自然,可以使用边缘增强过滤器。 基本概念保持不变,但是我们使用近似的高斯核来构建此过滤器。 当我们增强边缘时,它将帮助我们平滑图像,从而使图像看起来更自然。
这是实现上述屏幕快照中所应用效果的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
cv2.imshow('Original', img)
# generating the kernels
kernel_sharpen_1 = np.array([[-1,-1,-1], [-1,9,-1], [-1,-1,-1]])
kernel_sharpen_2 = np.array([[1,1,1], [1,-7,1], [1,1,1]])
kernel_sharpen_3 = np.array([[-1,-1,-1,-1,-1],
[-1,2,2,2,-1],
[-1,2,8,2,-1],
[-1,2,2,2,-1],
[-1,-1,-1,-1,-1]]) / 8.0
# applying different kernels to the input image
output_1 = cv2.filter2D(img, -1, kernel_sharpen_1)
output_2 = cv2.filter2D(img, -1, kernel_sharpen_2)
output_3 = cv2.filter2D(img, -1, kernel_sharpen_3)
cv2.imshow('Sharpening', output_1)
cv2.imshow('Excessive Sharpening', output_2)
cv2.imshow('Edge Enhancement', output_3)
cv2.waitKey(0)
如果您注意到,在前面的代码中,我们没有将前两个核除以归一化因子。 这样做的原因是核内部的值总和为 1,因此我们将矩阵隐式除以 1。
了解模式
您一定已经在图像过滤代码示例中注意到了一种常见模式。 我们构建一个核,然后使用filter2D获得所需的输出。 这也正是此代码示例中发生的事情! 您可以使用核中的值,看看是否可以获得不同的视觉效果。 确保在应用核之前对核进行了标准化,否则图像将显得太亮,因为您是在人为地增加图像中的像素值。
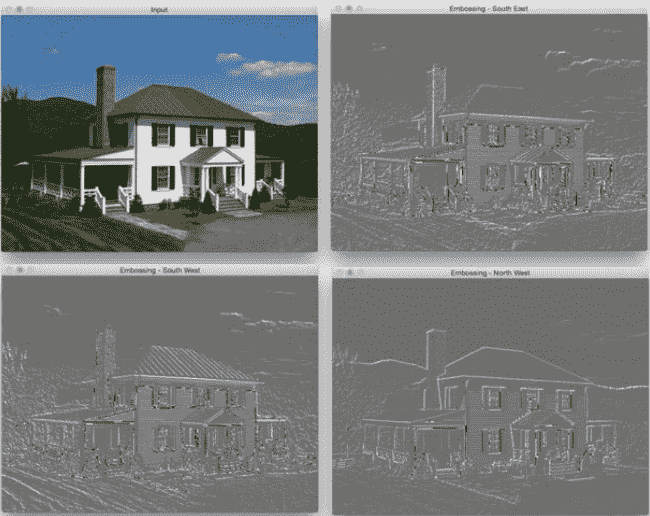
浮雕
浮雕过滤器将拍摄图像并将其转换为浮雕图像。 我们基本上会获取每个像素,然后将其替换为阴影或高光。 假设我们正在处理图像中相对较平坦的区域。 在这里,我们需要用纯灰色代替它,因为那里没有太多信息。 如果在特定区域有很多对比度,我们将根据浮雕的方向将其替换为白色像素(高光)或深色像素(阴影)。
它将是这样的:
让我们看一下代码,看看如何做到这一点:
import cv2
import numpy as np
img_emboss_input = cv2.imread('images/input.jpg')
# generating the kernels
kernel_emboss_1 = np.array([[0,-1,-1],
[1,0,-1],
[1,1,0]])
kernel_emboss_2 = np.array([[-1,-1,0],
[-1,0,1],
[0,1,1]])
kernel_emboss_3 = np.array([[1,0,0],
[0,0,0],
[0,0,-1]])
# converting the image to grayscale
gray_img = cv2.cvtColor(img_emboss_input,cv2.COLOR_BGR2GRAY)
# applying the kernels to the grayscale image and adding the offset to produce the shadow
output_1 = cv2.filter2D(gray_img, -1, kernel_emboss_1) + 128
output_2 = cv2.filter2D(gray_img, -1, kernel_emboss_2) + 128
output_3 = cv2.filter2D(gray_img, -1, kernel_emboss_3) + 128
cv2.imshow('Input', img_emboss_input)
cv2.imshow('Embossing - South West', output_1)
cv2.imshow('Embossing - South East', output_2)
cv2.imshow('Embossing - North West', output_3)
cv2.waitKey(0)
如果运行前面的代码,您将看到输出图像已浮雕。 从前面的核可以看到,我们只是将当前像素值替换为特定方向上相邻像素值的差。 通过将图像中的所有像素值都偏移128来实现浮雕效果。 此操作将高光/阴影效果添加到图片。
边缘检测
边缘检测的过程涉及检测图像中的尖锐边缘,并生成二进制图像作为输出。 通常,我们在黑色背景上绘制白线以指示这些边缘。 我们可以将边缘检测视为高通滤波操作。 高通过滤器允许高频内容通过并阻止低频内容。 如前所述,边缘是高频内容。 在边缘检测中,我们要保留这些边缘并丢弃其他所有内容。 因此,我们应该构建一个等效于高通过滤器的核。
让我们从一个称为Sobel过滤器的简单边缘检测过滤器开始。 由于边缘会同时出现在水平和垂直方向,因此Sobel过滤器由以下两个核组成:
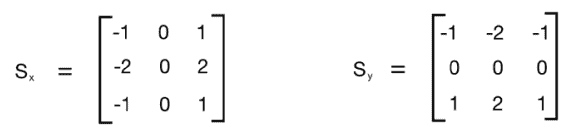
左侧的核检测水平边缘,右侧的核检测垂直边缘。 OpenCV 提供了直接将Sobel过滤器应用于给定图像的函数。 这是使用 Sobel 过滤器检测边缘的代码:
import cv2
import numpy as np
img = cv2.imread('images/input_shapes.png', cv2.IMREAD_GRAYSCALE)
rows, cols = img.shape
# It is used depth of cv2.CV_64F.
sobel_horizontal = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=5)
# Kernel size can be: 1,3,5 or 7.
sobel_vertical = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=5)
cv2.imshow('Original', img)
cv2.imshow('Sobel horizontal', sobel_horizontal)
cv2.imshow('Sobel vertical', sobel_vertical)
cv2.waitKey(0)
对于 8 位输入图像,这将导致截断的导数,因此可以使用深度值cv2.CV_16U代替。 如果边缘定义不明确,可以调整核的值,将其设置为较小可获得较薄的边缘,而对于相反的目的则为较大。
输出将类似于以下内容:
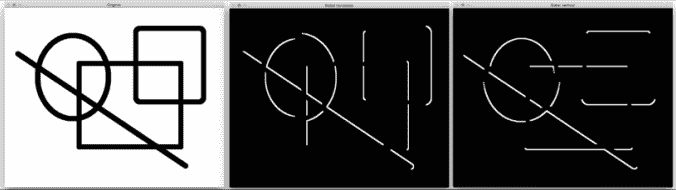
在上图中,中间的图像是水平边缘检测器的输出,而右边的图像是垂直边缘检测器。 正如我们在这里看到的,Sobel过滤器可以检测水平或垂直方向上的边缘,并且不能为我们提供所有边缘的整体视图。 为了克服这个问题,我们可以使用Laplacian过滤器。 使用此过滤器的优点是它在两个方向上都使用了双导数。 您可以使用以下行来调用该函数:
laplacian = cv2.Laplacian(img, cv2.CV_64F)
输出将类似于以下屏幕截图:
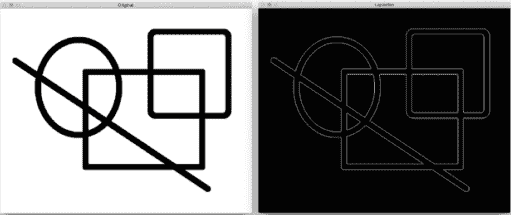
即使Laplacian核在这种情况下也能很好地工作,但它并不总是能很好地工作。 如下面的屏幕快照所示,这会在输出中引起很多噪声。 这是Canny边缘检测器派上用场的地方:
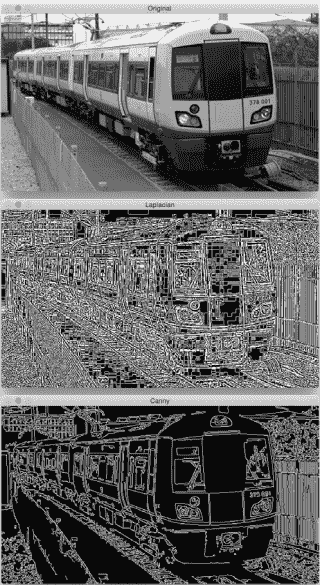
正如我们在前面的图像中看到的,Laplacian核会产生一个嘈杂的输出,这并不是完全有用的。 为了克服这个问题,我们使用了Canny边缘检测器。 要使用Canny边缘检测器,我们可以使用以下函数:
canny = cv2.Canny(img, 50, 240)
如我们所见,Canny边缘检测器的质量要好得多。 它使用两个数字作为参数来指示阈值。 第二个参数称为低阈值值,第三个参数称为高阈值值。 如果梯度值超出高阈值,则将其标记为强边缘。 Canny边缘检测器从此点开始跟踪边缘,并继续进行处理,直到梯度值降至低阈值以下。 随着增加这些阈值,较弱的边缘将被忽略。 输出图像将更清晰,更稀疏。 您可以尝试使用阈值,并查看增加或减小阈值会发生什么。 总体表述很深。 您可以通过以下网址了解更多信息。
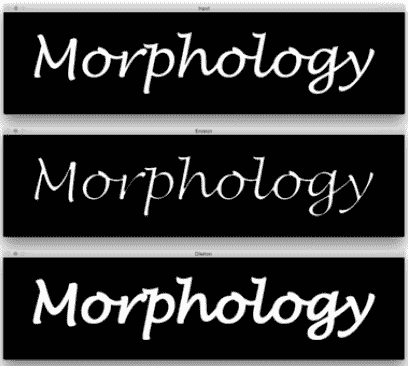
侵蚀和膨胀
侵蚀和膨胀是形态图像处理操作。 形态图像处理基本上涉及修改图像中的几何结构。 这些操作主要是为二进制图像定义的,但是我们也可以在灰度图像上使用它们。 侵蚀基本上剥夺了结构中最外面的像素层,而膨胀使结构增加了额外的像素层。
让我们看看这些操作是什么样的:
以下是实现此目的的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg', 0)
kernel = np.ones((5,5), np.uint8)
img_erosion = cv2.erode(img, kernel, iterations=1)
img_dilation = cv2.dilate(img, kernel, iterations=1)
cv2.imshow('Input', img)
cv2.imshow('Erosion', img_erosion)
cv2.imshow('Dilation', img_dilation)
cv2.waitKey(0)
事后思考
OpenCV 提供直接腐蚀和扩大图像的函数。 它们分别称为腐蚀和膨胀。 值得注意的是这两个函数中的第三个参数。 迭代次数将确定您要腐蚀/扩大给定图像的数量。 它基本上将操作顺序地应用于所得图像。 您可以拍摄样本图像,并使用此参数来查看结果。
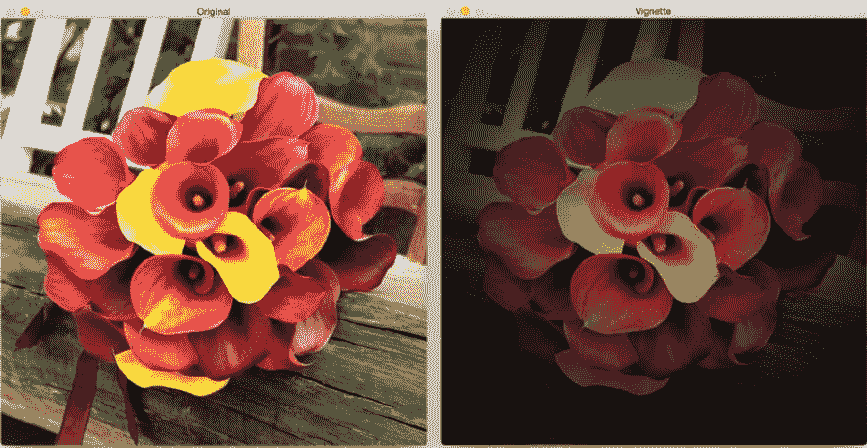
创建晕影过滤器
使用我们拥有的所有信息,让我们看看是否可以创建一个漂亮的小插图过滤器。 输出将类似于以下内容:
这是实现此效果的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
rows, cols = img.shape[:2]
# generating vignette mask using Gaussian kernels
kernel_x = cv2.getGaussianKernel(cols,200)
kernel_y = cv2.getGaussianKernel(rows,200)
kernel = kernel_y * kernel_x.T
mask = 255 * kernel / np.linalg.norm(kernel)
output = np.copy(img)
# applying the mask to each channel in the input image
for i in range(3):
output[:,:,i] = output[:,:,i] * mask
cv2.imshow('Original', img)
cv2.imshow('Vignette', output)
cv2.waitKey(0)
到底发生了什么?
晕影过滤器基本上将亮度聚焦在图像的特定部分上,而其他部分则显得褪色。 为了实现这一点,我们需要使用高斯核过滤掉图像中的每个通道。 OpenCV 提供了执行此操作的函数,称为getGaussianKernel。 我们需要构建一个 2D 核,其大小与图像的大小匹配。 函数的第二个参数getGaussianKernel很有趣。 它是高斯的标准差,它控制明亮的中心区域的半径。 您可以试用此参数,并查看它如何影响输出。
构建 2D 核后,需要通过标准化该核并按比例放大来构建遮罩,如以下行所示:
mask = 255 * kernel / np.linalg.norm(kernel)
这是重要的一步,因为如果您不按比例放大图像,图像将看起来很黑。 发生这种情况是因为在将遮罩叠加在输入图像上之后,所有像素值都将接近于零。 此后,我们遍历所有颜色通道并将遮罩应用于每个通道。
我们如何转移焦点?
现在,我们知道如何创建聚焦于图像中心的小插图过滤器。 假设我们要实现相同的晕影效果,但我们要关注图像中的其他区域,如下图所示:
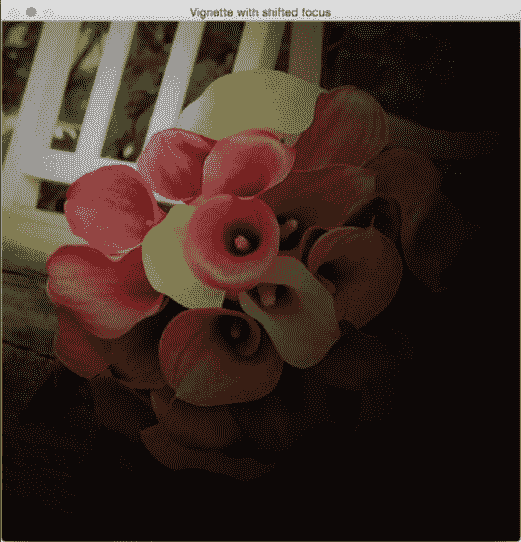
我们需要做的是建立一个更大的高斯核,并确保该峰与兴趣区域重合。 以下是实现此目的的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
rows, cols = img.shape[:2]
# generating vignette mask using Gaussian kernels
kernel_x = cv2.getGaussianKernel(int(1.5*cols),200)
kernel_y = cv2.getGaussianKernel(int(1.5*rows),200)
kernel = kernel_y * kernel_x.T
mask = 255 * kernel / np.linalg.norm(kernel)
mask = mask[int(0.5*rows):, int(0.5*cols):]
output = np.copy(img)
# applying the mask to each channel in the input image
for i in range(3):
output[:,:,i] = output[:,:,i] * mask
cv2.imshow('Input', img)
cv2.imshow('Vignette with shifted focus', output)
cv2.waitKey(0)
增强图像的对比度
每当我们在弱光条件下拍摄图像时,图像就会变暗。 当您在晚上或昏暗的房间中拍摄图像时,通常会发生这种情况。 您一定已经多次看到这种情况! 发生这种情况的原因是,当我们在这种条件下捕获图像时,像素值趋于集中在零附近。 发生这种情况时,人眼无法清晰看到图像中的许多细节。 人眼喜欢对比度,因此我们需要调整对比度以使图像看起来既美观又令人愉悦。 许多相机和照片应用已经隐式地执行了此操作。 我们使用称为直方图均衡的过程来实现这一目标。
举个例子,这是对比度增强前后的样子:
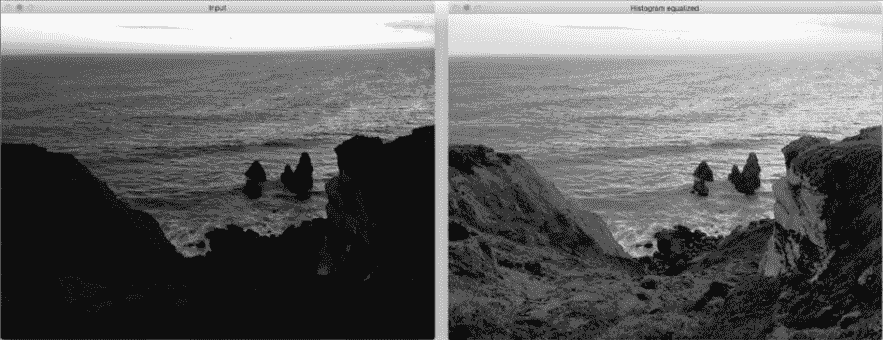
如我们在这里看到的,左侧的输入图像确实很暗。 为了解决这个问题,我们需要调整像素值,以使它们分布在整个值范围内,即介于 0-255 之间。
以下是用于调整像素值的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg', 0)
# equalize the histogram of the input image
histeq = cv2.equalizeHist(img)
cv2.imshow('Input', img)
cv2.imshow('Histogram equalized', histeq)
cv2.waitKey(0)
直方图均衡化适用于灰度图像。 OpenCV 提供了equalizeHist函数来实现此效果。 就像我们在这里看到的那样,代码非常简单,我们读取图像并均衡其直方图以归一化亮度并增加图像的对比度。
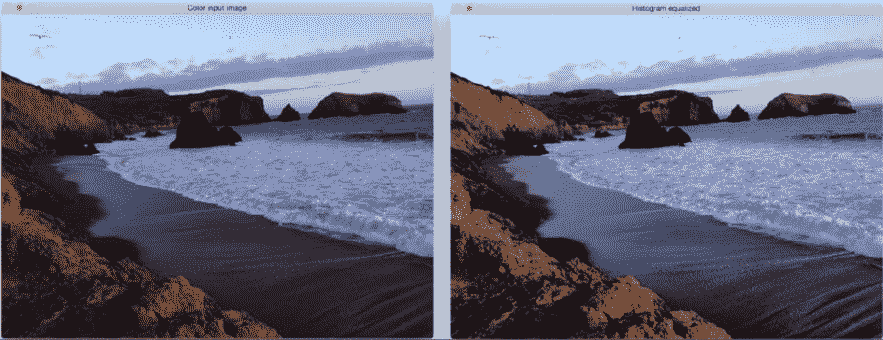
我们如何处理彩色图像?
既然我们知道如何均衡灰度图像的直方图,您可能想知道如何处理彩色图像。 直方图均衡化是一个非线性过程。 因此,我们不能仅将 RGB 图像中的三个通道分离出来,分别对直方图进行均衡,然后再将它们组合以形成输出图像。 直方图均衡化的概念仅适用于图像中的强度值。 因此,我们必须确保在进行此操作时不要修改颜色信息。
为了处理彩色图像的直方图均衡化,我们需要将其转换为色彩空间,其中强度与色彩信息分开。 YUV 是这种颜色空间的一个很好的例子,因为 YUV 模型根据一个亮度(Y)和两个色度(UV)成分。 一旦将其转换为 YUV,我们只需要均衡 Y 通道并将其与其他两个通道组合即可获得输出图像。
以下是其外观的示例:
这是实现彩色图像直方图均衡的代码:
import cv2
import numpy as np
img = cv2.imread('images/input.jpg')
img_yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)
# equalize the histogram of the Y channel
img_yuv[:,:,0] = cv2.equalizeHist(img_yuv[:,:,0])
# convert the YUV image back to RGB format
img_output = cv2.cvtColor(img_yuv, cv2.COLOR_YUV2BGR)
cv2.imshow('Color input image', img)
cv2.imshow('Histogram equalized', img_output)
cv2.waitKey(0)
总结
在本章中,我们学习了如何使用图像过滤器将酷炫的视觉效果应用于图像。 我们讨论了基本的图像处理运算符,以及如何使用它们来构建各种东西。 我们学习了如何使用各种方法检测边缘。 我们了解了 2D 卷积的重要性以及如何在不同的场景中使用它。 我们讨论了如何使图像平滑,运动模糊,锐化,浮雕,腐蚀和扩大图像。 我们学习了如何创建晕影过滤器,以及如何更改焦点区域。 我们讨论了对比度增强以及如何使用直方图均衡来实现它。
在下一章中,我们将讨论如何对给定图像进行卡通化。
