二、iPhone 或 iPad 上基于标记的增强现实
增强现实(AR)是真实环境的实时视图,其元素由计算机生成的图形增强。 结果,该技术通过增强当前对现实的感知而起作用。 增强通常是实时的,并且在语义环境中具有环境元素。 借助先进的增强现实技术(例如,添加计算机视觉和对象识别),有关用户周围真实世界的信息将变为交互性并可进行数字化处理。 有关环境及其对象的人工信息可以覆盖在现实世界中。
在本章中,我们将为 iPhone/iPad 设备创建一个 AR 应用。 从头开始,我们将创建一个使用标记的应用,以在从相机获取的图像上绘制一些人造物体。 您将学习如何在 XCode IDE 中设置项目并将其配置为在应用中使用 OpenCV。 此外,将说明诸如从内置摄像机捕获视频,使用 OpenGL ES 进行 3D 场景渲染以及构建通用 AR 应用架构等方面。
在开始之前,让我给您简要介绍所需的知识和软件:
- 您将需要一台装有 XCode IDE 的 Apple 计算机。 只有使用 Apple 的 XCode IDE 才能为 iPhone/iPad 开发应用。 这是为此平台构建应用的唯一方法。
- 您将需要 iPhone,iPad 或 iPod Touch 设备的型号。 要在设备上运行应用,您必须每年以 99 美元的价格购买 Apple 开发者证书。 没有此证书,无法在设备上运行开发的应用。
- 您还将需要 XCode IDE 的基本知识。 我们将假定读者具有使用此 IDE 的经验。
- 也需要 Objective-C 和 C++ 编程语言的基本知识。 但是,将详细说明应用源代码的所有复杂部分。
从本章中,您将了解有关标记的更多信息。 说明了完整的检测例程。 阅读完本章后,您将能够编写自己的标记检测算法,根据相机姿势估计 3D 世界中的标记姿势,并使用它们之间的这种转换来可视化任意 3D 对象。
您将在本书的媒体中找到本章的示例项目。 这是创建您的第一个移动增强现实应用的良好起点。
在本章中,我们将介绍以下主题:
- 创建一个使用 OpenCV 的 iOS 项目
- 应用架构
- 标记检测
- 标记识别
- 标记代码识别
- 在 3D 中放置标记
- 渲染 3D 虚拟对象
创建使用 OpenCV 的 iOS 项目
在本节中,我们将为 iPhone/iPad 设备创建一个演示应用,该应用将使用 OpenCV(开源计算机视觉)库来检测相机帧中的标记并在其上渲染 3D 对象。 此示例将展示如何从设备相机访问原始视频数据流,如何使用 OpenCV 库执行图像处理,如何在图像中找到标记以及渲染 AR 叠加层。
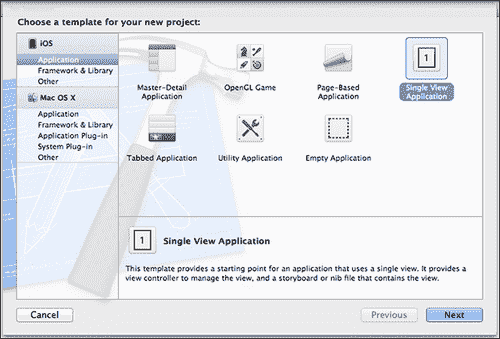
我们将首先通过选择 iOS 单视图应用模板来创建一个新的 XCode 项目,如以下屏幕快照所示:
现在,我们必须将 OpenCV 添加到我们的项目中。 这一步是必需的,因为在此应用中,我们将使用该库中的许多功能来检测标记并估计位置。
OpenCV 是用于实时计算机视觉的编程功能库。 它最初由 Intel 开发,现在得到 Willow Garage 和 Itseez 的支持。 该库是用 C 和 C++ 语言编写的。 它还具有官方的 Python 绑定和对 Java 和.NET 语言的非官方绑定。
添加 OpenCV 框架
幸运的是该库是跨平台的,因此可以在 iOS 设备上使用。 从 2.4.2 版本开始,iOS 平台上正式支持 OpenCV 库,您可以从库网站下载发行包。 用于 iOS 的 OpenCV 链接指向压缩的 OpenCV 框架。 如果您不熟悉 iOS 开发,请不要担心。 框架就像一堆文件。 通常,每个框架包都包含一个头文件列表和一个静态链接库列表。 应用框架提供了一种将预编译的库分发给开发人员的简便方法。
当然,您可以从头开始构建自己的库。 OpenCV 文档详细解释了此过程。 为简单起见,我们遵循推荐的方法并使用本章的框架。
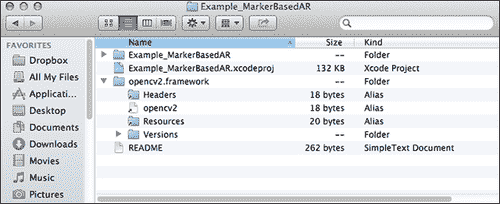
下载文件后,我们将其内容提取到项目文件夹中,如以下屏幕截图所示:
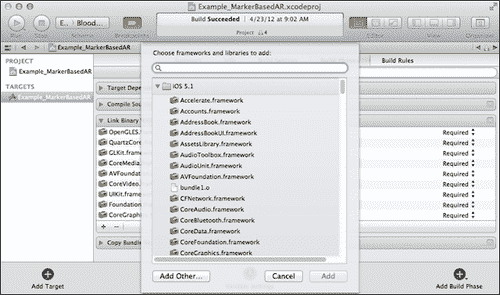
要通知 XCode IDE 在构建阶段使用任何框架,请单击项目选项,然后找到构建阶段选项卡。 在这里,我们可以添加或删除构建过程中涉及的框架列表。 单击加号以添加新帧,如以下屏幕截图所示:
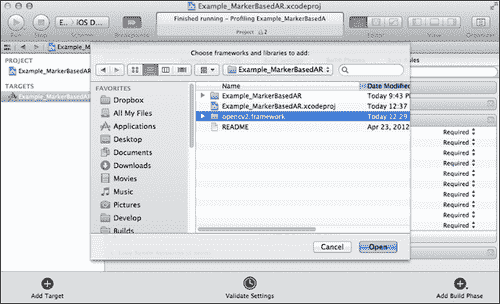
从这里,我们可以从标准框架列表中选择 。 但是要添加自定义框架,我们应该单击添加其他按钮。 将显示打开文件对话框。 将其指向项目文件夹中的opencv2.framework,如以下屏幕截图所示:
包含 OpenCV 头文件
现在我们已经将 OpenCV 框架添加到了项目中,一切都差不多了。 最后一件事-让 OpenCV 标头添加到项目的预编译标头中。 预编译头文件是加快编译时间的重要功能。 通过向它们添加 OpenCV 标头,您的所有源代码也会自动包含 OpenCV 标头。 在项目源代码树中找到一个.pch文件,并按以下方式对其进行修改。
以下代码显示了如何在项目源代码树中修改.pch文件:
//
// Prefix header for all source files of the 'Example_MarkerBasedAR'
//
#import <Availability.h>
#ifndef __IPHONE_5_0
#warning "This project uses features only available in iOS SDK 5.0 and later."
#endif
#ifdef __cplusplus
#include <opencv2/opencv.hpp>
#endif
#ifdef __OBJC__
#import <UIKit/UIKit.h>
#import <Foundation/Foundation.h>
#endif
现在,您可以从项目中的任何位置调用任何 OpenCV 函数。
就这样。 我们的项目模板已配置完毕,我们准备进一步进行操作。 免费建议:复制该项目; 这将在您创建下一个时节省您的时间!
应用架构
每个 iOS 应用至少包含UIViewController接口接口的一个实例,该实例处理所有视图事件并管理该应用的业务逻辑。 此类提供了所有 iOS 应用的基本视图管理模型。 视图控制器管理一组视图,这些视图构成了应用用户界面的一部分。 作为应用控制器层的一部分,视图控制器将其工作与模型对象和其他控制器对象(包括其他视图控制器)进行协调,因此您的应用将呈现一个统一的用户界面。
我们将要编写的应用只有一个视图。 这就是为什么我们选择单视图应用模板来创建一个模板的原因。 该视图将用于呈现渲染的图片。 我们的ViewController类将包含每个 AR 应用应具有的三个主要组件(请参见下图):
- 视频来源
- 处理管道
-
可视化引擎
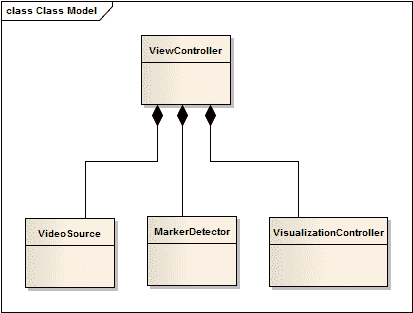
视频源负责将内置摄像机拍摄的新帧提供给用户代码。 这意味着视频源应该能够选择摄像头设备(前置或后置摄像头),调整其参数(例如捕获的视频的分辨率,白平衡和快门速度)以及抓取帧而不会冻结视频源。 主界面。
图像处理例程将封装在[HTG7] MarkerDetector类中。 此类为用户代码提供了非常薄的接口。 通常,它是processFrame 和getResult之类的一组函数。 实际上,这就是ViewController应该知道的全部。 没有强烈的必要性,我们决不能将低层数据结构和算法暴露给视图层。 在我们看来,VisualizationController 包含与增强现实的可视化有关的所有逻辑。 VisualizationController还是隐藏渲染引擎特定实现的外观。 低代码一致性使我们可以自由更改这些组件,而无需重写其余代码。
这种方法使您可以自由地在其他平台和编译器上使用独立模块。 例如,您可以轻松使用MarkerDetector类在 Mac,Windows 和 Linux 系统上开发桌面应用,而无需更改代码。 同样,您可以决定在 Windows 平台上移植VisualizationController并使用 Direct3D 进行渲染。 在这种情况下,您应该只编写新的VisualizationController实现; 其他代码部分将保持不变。
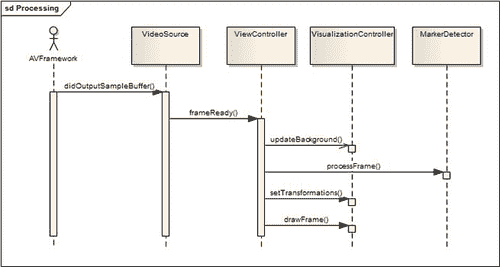
主要处理例程从接收到来自视频源的新帧开始。 这将触发视频源,以通过回调将有关此事件的信息通知用户代码。 ViewController处理此回调并执行以下操作:
- 将新帧发送到可视化控制器。
- 使用我们的管道执行新帧的处理。
- 将检测到的标记发送到可视化阶段。
- 渲染场景。
让我们详细研究这个例程。 AR 场景的渲染包括具有最后接收到的帧的内容的背景图像的绘制; 稍后将绘制人造 3D 对象。 当我们发送新的帧进行可视化时,我们正在将图像数据复制到渲染引擎的内部缓冲区。 这还不是实际的渲染。 我们只是使用新的位图更新文本。
第二步是新帧和标记检测的处理。 我们将图像作为输入,并因此收到检测到的标记的列表。 在上面。 这些标记被传递到可视化控制器,该控制器知道如何处理它们。 让我们看一下显示此例程的以下序列图:
我们通过编写视频捕获组件来开始开发。 此类将负责所有帧捕获,并负责通过用户回调发送捕获的帧的通知。 稍后,我们将编写标记检测算法。 此检测例程是应用的核心。 在程序的这一部分中,我们将使用许多 OpenCV 函数来处理图像,检测图像上的轮廓,找到标记矩形并估计其位置。 之后,我们将集中于使用增强现实技术对结果进行可视化。 将所有这些内容整合在一起之后,我们将完成我们的第一个 AR 应用。 让我们继续前进!
访问相机
没有两个主要内容,就无法创建增强现实应用:视频捕获和 AR 可视化。 视频捕获阶段包括从设备相机接收帧,执行必要的颜色转换并将其发送到处理管道。 由于单帧处理时间对于 AR 应用至关重要,因此捕获过程应尽可能高效。 达到最佳性能的最佳方法是直接访问从相机接收的帧。 从 iOS 版本 4 开始,这成为可能。AVFoundation 框架中的现有 API 提供了直接从内存中的图像缓冲区读取所需的必要功能。
您可以找到很多使用AVCaptureVideoPreviewLayer类和UIGetScreenImage函数从摄像机捕获视频的示例。 此技术用于 iOS 版本 3 和更早版本。 现在它已经过时,并且具有两个主要缺点:
- 缺少对帧数据的直接访问。 要获得位图,您必须创建
UIImage的中间实例,将图像复制到该实例,然后将其取回。 对于 AR 应用来说,这个价格太高了,因为每个毫秒都很重要。 每秒丢失几帧(FPS)会大大降低总体用户体验。 - 要绘制 AR,您必须添加一个透明的叠加视图以显示 AR。 参考 Apple 准则,应避免使用不透明的图层,因为它们对移动处理器来说很难混合。
类别AVCaptureDevice 和AVCaptureVideoDataOutput 允许您配置,捕获和指定 32 bpp BGRA 格式的未处理视频帧。 您还可以设置输出帧的所需分辨率。 但是,它确实会影响整体性能 ,因为帧越大,就需要更多的处理时间和内存。
高性能视频捕获是一个很好的选择。 AVFoundation API 提供了一种更快,更优雅的方法来直接从相机抓取帧。 但首先,让我们看一下下图,其中显示了 iOS 的捕获过程:
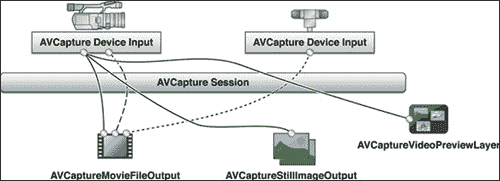
AVCaptureSession 是我们应该创建的根捕获对象。 捕获会话需要两个组件-输入和输出。 输入设备可以是物理设备(摄像机)或视频文件(未在图中显示)。 在我们的情况下,它是内置摄像头(正面或背面)。 可以通过以下接口之一显示输出设备:
AVCaptureMovieFileOutputAVCaptureStillImageOutputAVCaptureVideoPreviewLayerAVCaptureVideoDataOutput
AVCaptureMovieFileOutput接口用于将视频录制到文件,AVCaptureStillImageOutput接口用于制作静态图像,AVCaptureVideoPreviewLayer接口用于在屏幕上播放视频预览。 我们对AVCaptureVideoDataOutput界面感兴趣,因为它可以直接访问视频数据。
注意
iOS 平台基于 Objective-C 编程语言构建。 因此,要使用 AVFoundation 框架,我们的类也必须用 Objective-C 编写。 在本节中,所有代码清单均使用 Objective-C++ 语言。
为了封装视频捕获过程,我们创建了VideoSource接口,如以下代码所示:
@protocol VideoSourceDelegate<NSObject>
-(void)frameReady:(BGRAVideoFrame) frame;
@end
@interface VideoSource : NSObject<AVCaptureVideoDataOutputSampleBufferDelegate>
{
}
@property (nonatomic, retain) AVCaptureSession *captureSession;
@property (nonatomic, retain) AVCaptureDeviceInput *deviceInput;
@property (nonatomic, retain) id<VideoSourceDelegate> delegate;
- (bool) startWithDevicePosition:(AVCaptureDevicePosition)devicePosition;
- (CameraCalibration) getCalibration;
- (CGSize) getFrameSize;
@end
在此回调中,我们锁定图像缓冲区以防止被任何新帧修改,获取指向图像数据和帧尺寸的指针。 然后,我们构造临时的 BGRAVideoFrame 对象,该对象通过特殊的委托传递给外部。 该代表具有以下原型:
@protocol VideoSourceDelegate<NSObject>
-(void)frameReady:(BGRAVideoFrame) frame;
@end
在VideoSourceDelegate中,VideoSource接口通知用户代码新帧可用。
下面列出了视频捕获的初始化的分步指南:
- 创建
AVCaptureSession的实例并设置捕获会话质量预设。 - 选择并创建
AVCaptureDevice。 您可以选择前置或后置摄像头,也可以使用默认摄像头。 - 使用创建的捕获设备初始化
AVCaptureDeviceInput并将其添加到捕获会话。 - 创建
AVCaptureVideoDataOutput的实例,并使用视频帧,回调委托的格式对其进行初始化,然后分派队列。 - 将捕获输出添加到捕获会话对象。
- 启动捕获会话。
让我们更详细地解释其中一些步骤。 创建捕获会话后,我们可以指定所需的质量预设,以确保获得最佳性能。 我们不需要处理高清质量的视频,因此640 x 480或更低的帧分辨率是一个不错的选择:
- (id)init
{
if ((self = [super init]))
{
AVCaptureSession * capSession = [[AVCaptureSession alloc] init];
if ([capSession canSetSessionPreset:AVCaptureSessionPreset640x480])
{
[capSession setSessionPreset:AVCaptureSessionPreset640x480];
NSLog(@"Set capture session preset AVCaptureSessionPreset640x480");
}
else if ([capSession canSetSessionPreset:AVCaptureSessionPresetLow])
{
[capSession setSessionPreset:AVCaptureSessionPresetLow];
NSLog(@"Set capture session preset AVCaptureSessionPresetLow");
}
self.captureSession = capSession;
}
return self;
}
注意
始终使用适当的 API 检查硬件功能; 不能保证每个摄像机都可以设置特定的会话预设。
在创建捕获会话之后,我们应该添加捕获输入-AVCaptureDeviceInput的实例将代表物理相机设备。 cameraWithPosition函数是一个辅助函数,可将相机设备返回到请求的位置(前,后或默认):
- (bool) startWithDevicePosition:(AVCaptureDevicePosition)devicePosition
{
AVCaptureDevice *videoDevice = [self cameraWithPosition:devicePosition];
if (!videoDevice)
return FALSE;
{
NSError *error;
AVCaptureDeviceInput *videoIn = [AVCaptureDeviceInput
deviceInputWithDevice:videoDevice error:&error];
self.deviceInput = videoIn;
if (!error)
{
if ([[self captureSession] canAddInput:videoIn])
{
[[self captureSession] addInput:videoIn];
}
else
{
NSLog(@"Couldn't add video input");
return FALSE;
}
}
else
{
NSLog(@"Couldn't create video input");
return FALSE;
}
}
[self addRawViewOutput];
[captureSession startRunning];
return TRUE;
}
请注意错误处理代码。 在重要的事情上要注意返回值,因为使用硬件设置是一个好习惯。 否则,您的代码可能会在意外情况下崩溃,而不会通知用户发生了什么。
我们创建了一个捕获会话,并添加了视频帧的来源。 现在是时候添加一个接收器—一个将接收实际帧数据的对象。 AVCaptureVideoDataOutput类用于处理视频流中的未压缩帧。 摄像机可以提供 BGRA,CMYK 或简单的灰度颜色模型的帧。 出于我们的目的,BGRA 颜色模型最适合所有人,因为我们将使用此框架进行可视化和图像处理。 以下代码显示addRawViewOutput函数:
- (void) addRawViewOutput
{
/*We setupt the output*/
AVCaptureVideoDataOutput *captureOutput = [[AVCaptureVideoDataOutput alloc] init];
/*While a frame is processes in -captureOutput:didOutputSampleBuffer:fromConnection: delegate methods no other frames are added in the queue.
If you don't want this behaviour set the property to NO */
captureOutput.alwaysDiscardsLateVideoFrames = YES;
/*We create a serial queue to handle the processing of our frames*/
dispatch_queue_t queue;
queue = dispatch_queue_create("com.Example_MarkerBasedAR.cameraQueue",
NULL);
[captureOutput setSampleBufferDelegate:self queue:queue];
dispatch_release(queue);
// Set the video output to store frame in BGRA (It is supposed to be faster)
NSString* key = (NSString*)kCVPixelBufferPixelFormatTypeKey;
NSNumber* value = [NSNumber
numberWithUnsignedInt:kCVPixelFormatType_32BGRA];
NSDictionary* videoSettings = [NSDictionary dictionaryWithObject:value
forKey:key];
[captureOutput setVideoSettings:videoSettings];
// Register an output
[self.captureSession addOutput:captureOutput];
}
现在,终于配置了捕获会话。 启动后,它将捕获相机中的帧并将其发送给用户代码。 当新帧可用时,AVCaptureSession对象将执行captureOutput: didOutputSampleBuffer:fromConnection回调。 在此函数中,我们将执行次要的数据转换操作,以更可用的格式获取图像数据并将其传递给用户代码:
- (void)captureOutput:(AVCaptureOutput *)captureOutput
didOutputSampleBuffer:(CMSampleBufferRef)sampleBuffer
fromConnection:(AVCaptureConnection *)connection
{
// Get a image buffer holding video frame
CVImageBufferRef imageBuffer = CMSampleBufferGetImageBuffer(sampleBuffer);
// Lock the image buffer
CVPixelBufferLockBaseAddress(imageBuffer,0);
// Get information about the image
uint8_t *baseAddress = (uint8_t *)CVPixelBufferGetBaseAddress(imageBuffer);
size_t width = CVPixelBufferGetWidth(imageBuffer);
size_t height = CVPixelBufferGetHeight(imageBuffer);
size_t stride = CVPixelBufferGetBytesPerRow(imageBuffer);
BGRAVideoFrame frame = {width, height, stride, baseAddress};
[delegate frameReady:frame];
/*We unlock the image buffer*/
CVPixelBufferUnlockBaseAddress(imageBuffer,0);
}
我们获得了一个用于存储帧数据的图像缓冲区的引用。 然后我们将其锁定,以防止被新帧修改。 现在,我们可以独占访问帧数据。 借助 CoreVideo API,我们可以获得图像尺寸,步幅(每行像素数)以及指向图像数据开头的指针。
注意
我提请您注意回调代码中的CVPixelBufferLockBaseAddress / CVPixelBufferUnlockBaseAddress函数调用。 在我们锁定像素缓冲区之前,它可以保证其数据的一致性和正确性。 只有获得锁定后,才能读取像素。 完成后,别忘了解锁它,以使操作系统可以用新数据填充它。
标记检测
标记通常被设计为一个矩形图像,其中包含黑色和白色区域。 由于已知的限制,标记物检测过程很简单。 首先,我们需要在输入图像上找到闭合轮廓并将其内部的图像扭曲成矩形,然后根据我们的标记模型进行检查。
在此示例中,将使用5 x 5标记。 看起来是这样的:
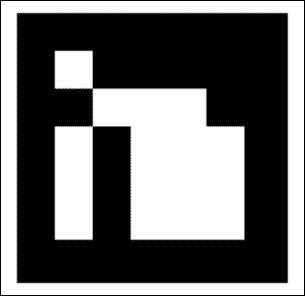
在本书的示例项目中,标记检测例程封装在[HTG2] MarkerDetector类中:
/**
* A top-level class that encapsulate marker detector algorithm
*/
class MarkerDetector
{
public:
/**
* Initialize a new instance of marker detector object
* @calibration[in] - Camera calibration necessary for pose estimation.
*/
MarkerDetector(CameraCalibration calibration);
void processFrame(const BGRAVideoFrame& frame);
const std::vector<Transformation>& getTransformations() const;
protected:
bool findMarkers(const BGRAVideoFrame& frame, std::vector<Marker>&
detectedMarkers);
void prepareImage(const cv::Mat& bgraMat,
cv::Mat& grayscale);
void performThreshold(const cv::Mat& grayscale,
cv::Mat& thresholdImg);
void findContours(const cv::Mat& thresholdImg,
std::vector<std::vector<cv::Point> >& contours,
int minContourPointsAllowed);
void findMarkerCandidates(const std::vector<std::vector<cv::Point> >&
contours, std::vector<Marker>& detectedMarkers);
void detectMarkers(const cv::Mat& grayscale,
std::vector<Marker>& detectedMarkers);
void estimatePosition(std::vector<Marker>& detectedMarkers);
private:
};
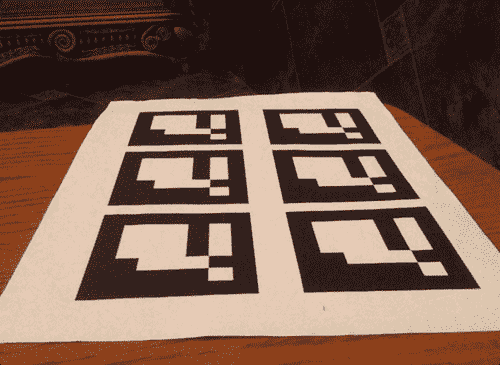
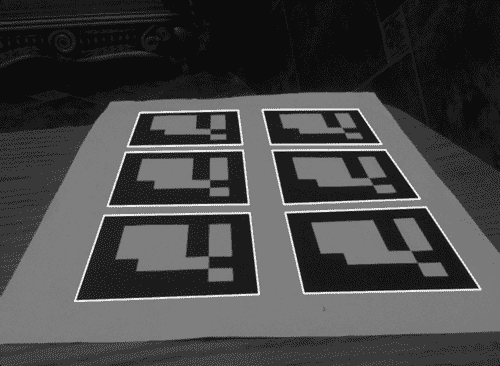
为了帮助您更好地了解标记检测例程,将显示视频中一帧的逐步处理。 以从 iPad 相机拍摄的源图像为例:
标记识别
这是标记检测例程的工作流程:
- 将输入图像转换为灰度。
- 执行二进制阈值操作。
- 检测轮廓。
- 搜索可能的标记。
- 检测和解码标记。
- 估计标记 3D 姿势。
灰度转换
必须转换为灰度,因为标记通常只包含黑白块,并且在灰度图像上使用它们更容易操作。 幸运的是,OpenCV 颜色转换非常简单。
请看一下下面的 C++ 代码清单:
void MarkerDetector::prepareImage(const cv::Mat& bgraMat, cv::Mat& grayscale)
{
// Convert to grayscale
cv::cvtColor(bgraMat, grayscale, CV_BGRA2GRAY);
}
此函数会将输入的 BGRA 图像转换为灰度(如果需要,它将分配图像缓冲区)并将结果放入第二个参数中。 所有其他步骤将对灰度图像执行。
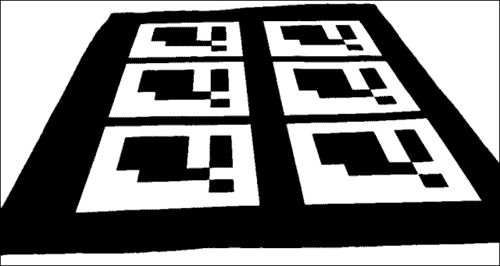
图像二值化
二值化操作将图像的每个像素转换为黑色(零强度)或白色(全强度)。 查找轮廓需要此步骤。 有几种阈值方法; 每个方面都有强项和弱项。 最简单,最快的方法是绝对阈值。 在这种方法中,结果值取决于当前像素强度和某个阈值。 如果像素强度大于阈值,则结果将为白色(255);否则,结果为白色(255)。 否则将为黑色(0)。
这种方法有一个很大的缺点-它取决于照明条件和柔和的强度变化。 更优选的方法是自适应阈值。 该方法的主要区别是使用了被检查像素周围给定半径的所有像素。 使用平均强度可获得良好的结果,并确保更可靠的角点检测。
以下代码段显示了MarkerDetector函数:
void MarkerDetector::performThreshold(const cv::Mat& grayscale, cv::Mat& thresholdImg)
{
cv::adaptiveThreshold(grayscale, // Input image
thresholdImg,// Result binary image
255, //
cv::ADAPTIVE_THRESH_GAUSSIAN_C, //
cv::THRESH_BINARY_INV, //
7, //
7 //
);
}
将自适应阈值应用于输入图像后,所得图像看起来类似于以下图像:
每个标记通常看起来像一个带有黑色和白色区域的正方形图形。 因此,定位标记的最佳方法是找到闭合轮廓,并使用 4 个顶点的多边形对其进行近似。
轮廓检测
cv::findCountours函数将检测输入二进制图像上的轮廓:
void MarkerDetector::findContours(const cv::Mat& thresholdImg,
std::vector<std::vector<cv::Point> >& contours,
int minContourPointsAllowed)
{
std::vector< std::vector<cv::Point> > allContours;
cv::findContours(thresholdImg, allContours, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
contours.clear();
for (size_t i=0; i<allContours.size(); i++)
{
int contourSize = allContours[i].size();
if (contourSize > minContourPointsAllowed)
{
contours.push_back(allContours[i]);
}
}
}
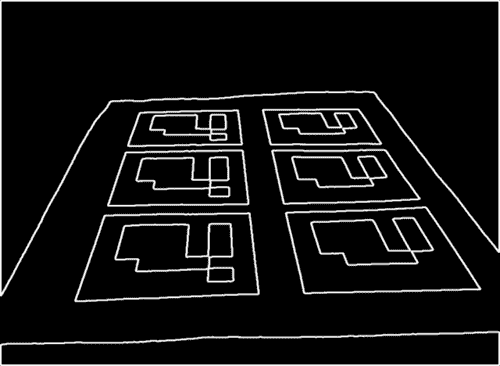
此函数的返回值是一个多边形列表,其中每个多边形代表一个轮廓。 该函数将跳过其周边像素值设置为小于minContourPointsAllowed变量的值的轮廓。 这是因为我们对小轮廓不感兴趣。 (它们可能不包含任何标记,或者由于标记尺寸太小而无法检测到轮廓。)
下图显示了检测到的轮廓的可视化:
候选者搜索
找到轮廓后,执行多边形逼近阶段。 这样做是为了减少描述轮廓形状的点的数量。 过滤掉没有标记的区域是一项很好的质量检查,因为它们总是可以用包含四个顶点的多边形来表示。 如果近似多边形的顶点多于或少于 4 个,则绝对不是我们想要的。 以下代码实现了这个想法:
void MarkerDetector::findCandidates
(
const ContoursVector& contours,
std::vector<Marker>& detectedMarkers
)
{
std::vector<cv::Point> approxCurve;
std::vector<Marker> possibleMarkers;
// For each contour, analyze if it is a parallelepiped likely to be the
marker
for (size_t i=0; i<contours.size(); i++)
{
// Approximate to a polygon
double eps = contours[i].size() * 0.05;
cv::approxPolyDP(contours[i], approxCurve, eps, true);
// We interested only in polygons that contains only four points
if (approxCurve.size() != 4)
continue;
// And they have to be convex
if (!cv::isContourConvex(approxCurve))
continue;
// Ensure that the distance between consecutive points is large enough
float minDist = std::numeric_limits<float>::max();
for (int i = 0; i < 4; i++)
{
cv::Point side = approxCurve[i] - approxCurve[(i+1)%4];
float squaredSideLength = side.dot(side);
minDist = std::min(minDist, squaredSideLength);
}
// Check that distance is not very small
if (minDist < m_minContourLengthAllowed)
continue;
// All tests are passed. Save marker candidate:
Marker m;
for (int i = 0; i<4; i++)
m.points.push_back( cv::Point2f(approxCurve[i].x,approxCurve[i].y) );
// Sort the points in anti-clockwise order
// Trace a line between the first and second point.
// If the third point is at the right side, then the points are anti-
clockwise
cv::Point v1 = m.points[1] - m.points[0];
cv::Point v2 = m.points[2] - m.points[0];
double o = (v1.x * v2.y) - (v1.y * v2.x);
if (o < 0.0) //if the third point is in the left side, then
sort in anti-clockwise order
std::swap(m.points[1], m.points[3]);
possibleMarkers.push_back(m);
}
// Remove these elements which corners are too close to each other.
// First detect candidates for removal:
std::vector< std::pair<int,int> > tooNearCandidates;
for (size_t i=0;i<possibleMarkers.size();i++)
{
const Marker& m1 = possibleMarkers[i];
//calculate the average distance of each corner to the nearest corner
of the other marker candidate
for (size_t j=i+1;j<possibleMarkers.size();j++)
{
const Marker& m2 = possibleMarkers[j];
float distSquared = 0;
for (int c = 0; c < 4; c++)
{
cv::Point v = m1.points[c] - m2.points[c];
distSquared += v.dot(v);
}
distSquared /= 4;
if (distSquared < 100)
{
tooNearCandidates.push_back(std::pair<int,int>(i,j));
}
}
}
// Mark for removal the element of the pair with smaller perimeter
std::vector<bool> removalMask (possibleMarkers.size(), false);
for (size_t i=0; i<tooNearCandidates.size(); i++)
{
float p1 = perimeter(possibleMarkers[tooNearCandidates[i].first
].points);
float p2 =
perimeter(possibleMarkers[tooNearCandidates[i].second].points);
size_t removalIndex;
if (p1 > p2)
removalIndex = tooNearCandidates[i].second;
else
removalIndex = tooNearCandidates[i].first;
removalMask[removalIndex] = true;
}
// Return candidates
detectedMarkers.clear();
for (size_t i=0;i<possibleMarkers.size();i++)
{
if (!removalMask[i])
detectedMarkers.push_back(possibleMarkers[i]);
}
}
现在我们已经获得了可能是标记的平行六面体列表。 要验证它们是否是标记,我们需要执行三个步骤:
- 首先,我们应该删除透视投影,以便获得矩形区域的正视图。
- 然后,我们使用大津算法对图像进行阈值处理。 该算法采用双峰分布,并找到使类别外方差最大化的阈值,同时保持较低的类别内方差。
- 最后,我们执行标记代码的识别。 如果是标记,则具有内部代码。 标记分为
7 x 7的网格,内部7 x 7的单元格包含 ID 信息。 其余部分对应于外部黑色边框。 在这里,我们首先检查外部黑色边框是否存在。 然后,我们读取内部的7 x 7单元并检查它们是否提供有效的代码。 (可能需要旋转代码以获得有效的代码。)
为了获得矩形标记图像,我们必须使用透视变换使输入图像不变形。 可以借助cv::getPerspectiveTransform函数来计算该矩阵。 它从四对对应点中找到透视变换。 第一个参数是图像空间中的标记坐标,第二个点对应于方形标记图像的坐标。 估计的转换会将标记转换为正方形,然后让我们对其进行分析:
cv::Mat canonicalMarker;
Marker& marker = detectedMarkers[i];
// Find the perspective transfomation that brings current marker to rectangular form
cv::Mat M = cv::getPerspectiveTransform(marker.points, m_markerCorners2d);
// Transform image to get a canonical marker image
cv::warpPerspective(grayscale, canonicalMarker, M, markerSize);
图像扭曲使用透视变换将图像变换为矩形形式:
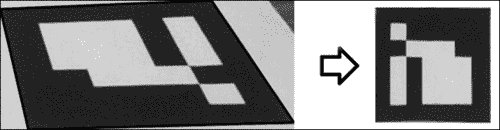
现在我们可以测试图像,以验证它是否是有效的标记图像。 然后,我们尝试使用标记代码提取位掩码。 因为我们期望标记仅包含黑白颜色,所以我们可以执行大津阈值处理以去除灰色像素并仅保留黑白像素:
//threshold image
cv::threshold(markerImage, markerImage, 125, 255, cv::THRESH_BINARY | cv::THRESH_OTSU);
标记代码识别
每个标记都有一个内部代码,该代码由 5 个字(每个 5 位)给出。 使用的编码是对汉明码的略微修改。 总体上,每个字在使用的 5 位中只有 2 位信息。 其他 3 个用于错误检测。 因此,我们最多可以有 1024 个不同的 ID。
与汉明码的主要区别在于第一位(位 3 和 5 的奇偶校验)被反转。 因此,ID 0(在汉明码中为 00000)在我们的代码中变为 10000。 这样做的目的是为了防止整个黑色矩形成为有效的标记 ID,目的是减少环境物体误报的可能性。
计算每个单元的黑白像素数量,我们得到带有标记代码的5 x 5位掩码。 要计算某个图像上的非零像素数,请使用cv::countNonZero函数。 此函数对给定的 1D 或 2D 数组中的非零数组元素进行计数。 cv::Mat类型可以返回子图像视图,即cv::Mat的新实例,其中包含原始图像的一部分。 例如,如果您有一个cv::Mat大小为400 x 400,则下面的代码段将从(10, 10)开始为5 x 5图像块创建一个子矩阵:
cv::Mat src(400,400,CV_8UC1);
cv::Rect r(10,10,50,50);
cv::Mat subView = src(r);
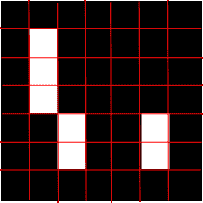
读取标记代码
使用这种技术,我们可以轻松地在标记板上找到黑白单元格:
cv::Mat bitMatrix = cv::Mat::zeros(5,5,CV_8UC1);
//get information(for each inner square, determine if it is black or white)
for (int y=0;y<5;y++)
{
for (int x=0;x<5;x++)
{
int cellX = (x+1)*cellSize;
int cellY = (y+1)*cellSize;
cv::Mat cell = grey(cv::Rect(cellX,cellY,cellSize,cellSize));
int nZ = cv::countNonZero(cell);
if (nZ> (cellSize*cellSize) /2)
bitMatrix.at<uchar>(y,x) = 1;
}
}
看下图的 。 根据相机的角度,同一标记可以有四种可能的表示形式:
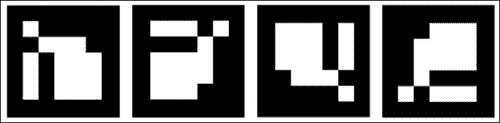
由于标记图片有四个可能的方向,因此我们必须找到正确的标记位置。 记住,我们为信息的每两位引入了三个奇偶校验位。 在他们的帮助下,我们可以找到每种可能的标记方向的汉明距离。 正确的标记位置的汉明距离误差为零,而其他旋转不会。
这是一个代码片段,该代码片段将位矩阵旋转四次并找到正确的标记方向:
//check all possible rotations
cv::Mat rotations[4];
int distances[4];
rotations[0] = bitMatrix;
distances[0] = hammDistMarker(rotations[0]);
std::pair<int,int> minDist(distances[0],0);
for (int i=1; i<4; i++)
{
//get the hamming distance to the nearest possible word
rotations[i] = rotate(rotations[i-1]);
distances[i] = hammDistMarker(rotations[i]);
if (distances[i] < minDist.first)
{
minDist.first = distances[i];
minDist.second = i;
}
}
该代码以使汉明距离量度的误差最小的方式找到位矩阵的方向。 对于正确的标记 ID,此误差应为零; 如果不是,则表示我们遇到了错误的标记模式(图像损坏或标记检测错误)。
标记位置优化
找到正确的标记方向后,我们分别旋转标记的角以符合其顺序:
//sort the points so that they are always in the same order
// no matter the camera orientation
std::rotate(marker.points.begin(), marker.points.begin() + 4 - nRotations,
marker.points.end());
在检测到标记并对其 ID 进行解码之后,我们将优化其角点。 当我们估计 3D 标记位置时,此操作将帮助我们进行下一步。 为了找到亚像素精度的角点位置,使用cv::cornerSubPix函数:
std::vector<cv::Point2f> preciseCorners(4 * goodMarkers.size());
for (size_t i=0; i<goodMarkers.size(); i++)
{
Marker& marker = goodMarkers[i];
for (int c=0;c<4;c++)
{
preciseCorners[i*4+c] = marker.points[c];
}
}
cv::cornerSubPix(grayscale, preciseCorners, cvSize(5,5), cvSize(-1,-1), cvTermCriteria(CV_TERMCRIT_ITER,30,0.1));
//copy back
for (size_t i=0;i<goodMarkers.size();i++)
{
Marker&marker = goodMarkers[i];
for (int c=0;c<4;c++)
{
marker.points[c] = preciseCorners[i*4+c];
}
}
第一步是为此函数准备输入数据。 我们将顶点列表复制到输入数组。 然后,我们将cv::cornerSubPix传递给实际图像,点列表以及影响位置改进质量和性能的参数集。 完成后,我们将精炼的位置复制回标记角,如下图所示。
由于其复杂性,我们在标记检测的早期阶段不使用cornerSubPix。 对于大量的点(就计算时间而言)调用此函数非常昂贵。 因此,我们仅对有效标记执行此操作。
将标记放置在 3D 中
增强现实尝试将真实世界的对象与虚拟内容融合在一起。 要将 3D 模型放置在场景中,我们需要了解用于获取视频帧的摄像机的姿势。 我们将在笛卡尔坐标系中使用欧几里得变换来表示这样的姿势。
标记在 3D 中的位置及其在 2D 中的对应投影受以下公式限制:
P = A * [R | T] * M
其中:
M表示 3D 空间中的点[R | T]表示表示欧几里德变换的[3 | 4]矩阵A表示摄像机矩阵或固有参数矩阵P表示M在屏幕空间中的投影
在执行标记检测步骤之后,我们现在知道 2D 中四个标记角的位置(屏幕空间中的投影)。 在下一节中,您将学习如何获取A矩阵和M向量参数,以及如何计算[R | T]变换。
相机校准
每个摄像机镜头都有独特的参数,例如焦距,主点和镜头畸变模型。 查找相机固有参数的过程称为相机校准。 相机校准过程对于增强现实应用非常重要,因为它描述了输出图像上的透视变换和镜头失真。 为了在增强现实中获得最佳用户体验,应该使用相同的透视投影来完成增强对象的可视化。
要校准相机,我们需要特殊的图案图像(棋盘或白色背景上的黑色圆圈)。 从不同的角度来看,正在校准的相机会对此模式拍摄 10-15 张照片。 然后,校准算法会找到最佳的相机固有参数和失真向量:
为了在我们的程序中表示摄像机的校准,我们使用CameraCalibration类:
/**
* A camera calibration class that stores intrinsic matrix and distorsion coefficients.
*/
class CameraCalibration
{
public:
CameraCalibration();
CameraCalibration(float fx, float fy, float cx, float cy);
CameraCalibration(float fx, float fy, float cx, float cy, float
distorsionCoeff[4]);
void getMatrix34(float cparam[3][4]) const;
const Matrix33& getIntrinsic() const;
const Vector4& getDistorsion() const;
private:
Matrix33 m_intrinsic;
Vector4 m_distorsion;
};
校准程序的详细说明不在本章范围之内。 请参考“OpenCV camera_calibration示例”或《OpenCV:在投影关系中估计图像》,以获取其他信息和源代码。
对于此示例 ,我们提供了所有现代 iOS 设备(iPad 2,iPad 3 和 iPhone 4)的内部参数。
标记姿势估计
利用标记角的精确位置,我们可以估计相机和 3D 空间中标记之间的转换。 将该操作称为根据 2D-3D 对应关系的姿势估计。 姿势估计过程会在相机和对象之间找到一个欧几里得变换(仅包含旋转和平移分量)。
让我们看一下下图:
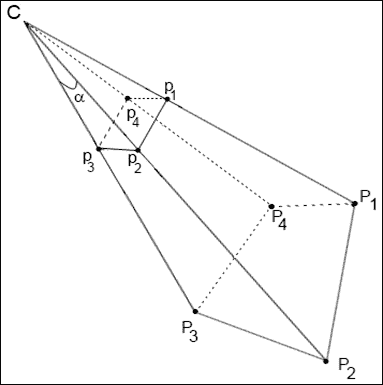
C用于表示相机中心。P1-P4点是世界坐标系中的 3D 点, p1-p4点是它们在相机像面上的投影。 我们的目标是使用本征矩阵和图像平面(P1-P4)上的已知点投影和相机C找到已知标记位置之间的相对转换。 但是,我们在哪里可以获得 3D 空间中标记位置(p1-p4)的坐标? 我们想象他们。 由于我们的标记始终具有正方形形状,并且所有顶点都位于一个平面上,因此我们可以如下定义它们的角:
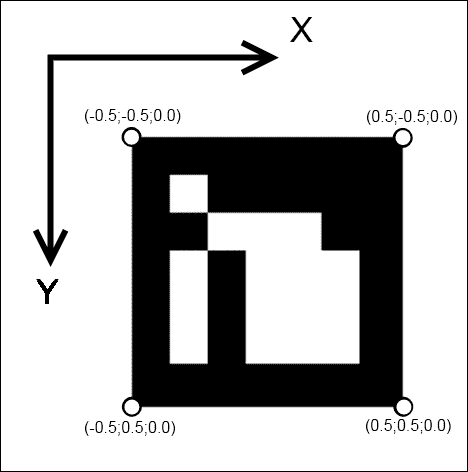
我们将标记放在 XY 平面(Z 分量为零)中,标记中心对应于(0, 0, 0)点。 这是一个很好的提示,因为在这种情况下,我们的坐标系的起点将位于标记的中心(Z 轴垂直于标记平面)。
要使用已知的 2D-3D 对应关系查找摄像机位置,可以使用cv::solvePnP函数:
void solvePnP(const Mat& objectPoints, const Mat& imagePoints, const Mat&
cameraMatrix, const Mat& distCoeffs, Mat& rvec, Mat& tvec, bool
useExtrinsicGuess=false);
objectPoints数组是对象坐标空间中对象点的输入数组。 可以在此处传递std::vector<cv::Point3f>。 也可以将 OpenCV 矩阵3 x N或N x 3(其中N是点数)作为输入参数传递。 在这里,我们传递 3D 空间(四个点的向量)中标记坐标的列表。
imagePoints数组是相应图像点(或投影)的数组。 此自变量也可以是2 x N或N x 2的std::vector<cv::Point2f>或cv::Mat,其中N是点数。 在这里,我们传递找到的标记角的列表。
cameraMatrix:这是3 x 3摄像机固有矩阵。distCoeffs:这是失真系数(k1, k2, p1, p2, k3)的输入4 x 1、1 x 4、5 x 1或1 x 5向量。 如果为NULL,则所有失真系数均设置为 0。rvec:这是输出旋转向量(与tvec一起)将点从模型坐标系带到摄像机坐标系。tvec:这是输出转换向量。useExtrinsicGuess:如果为true,则该函数将分别使用提供的rvec和tvec向量作为旋转向量和平移向量的初始近似值,并将对其进行进一步优化。
该函数以最小化重投影误差(即观察到的投影imagePoints与投影的objectPoints之间的距离平方的总和)的方式计算相机变换。
估计的变换由旋转(rvec)和平移分量(tvec)定义。 这也称为欧几里得变换或刚性变换。
刚性转换的正式定义是,当作用于任何向量v时,产生以下形式的转换向量T(v)的转换:
T(v) = Rv + t
其中R^T = R^(-1)(即R是正交变换),t是给出原点平移的向量。 此外,适当的刚性转换还具有
It(R) = 1
这意味着R不产生反射,因此代表旋转(保留方向的正交变换)。
为了从旋转向量获得3 x 3旋转矩阵,使用函数cv::Rodrigues。 此函数转换由旋转向量表示的旋转,并返回其等效旋转矩阵。
注意
因为cv::solvePnP根据 3D 空间中的标记姿势找到了相机位置,所以我们必须反转找到的变换。 生成的变换将描述相机坐标系中的标记变换,这对于渲染过程而言更为友好。
这是estimatePosition函数的清单 ,可找到检测到的标记的位置:
void MarkerDetector::estimatePosition(std::vector<Marker>& detectedMarkers)
{
for (size_t i=0; i<detectedMarkers.size(); i++)
{
Marker& m = detectedMarkers[i];
cv::Mat Rvec;
cv::Mat_<float> Tvec;
cv::Mat raux,taux;
cv::solvePnP(m_markerCorners3d, m.points, camMatrix, distCoeff,raux,taux);
raux.convertTo(Rvec,CV_32F);
taux.convertTo(Tvec ,CV_32F);
cv::Mat_<float> rotMat(3,3);
cv::Rodrigues(Rvec, rotMat);
// Copy to transformation matrix
m.transformation = Transformation();
for (int col=0; col<3; col++)
{
for (int row=0; row<3; row++)
{
m.transformation.r().mat[row][col] = rotMat(row,col); // Copy rotation
component
}
m.transformation.t().data[col] = Tvec(col); // Copy translation
component
}
// Since solvePnP finds camera location, w.r.t to marker pose, to get
marker pose w.r.t to the camera we invert it.
m.transformation = m.transformation.getInverted();
}
渲染 3D 虚拟对象
因此,到目前为止,您已经知道如何在图像上找到标记,以计算它们相对于相机在空间中的确切位置。 现在该画点东西了。 如前所述,要渲染场景,我们将使用 OpenGL 函数。 3D 可视化是增强现实的核心部分。 OpenGL 提供了用于创建高质量渲染的所有基本功能。
注意
有大量的商业和开源 3D 引擎(Unity ,虚幻引擎, Ogre 等)。 但是所有这些引擎都使用 OpenGL 或 DirectX 将命令传递给视频卡。 DirectX 是专有 API,仅 Windows 平台支持。 因此,OpenGL 是构建跨平台渲染系统的第一个也是最后一个候选对象。
了解渲染系统的原理将为您提供必要的经验和知识,以供将来使用这些引擎或编写自己的引擎。
创建 OpenGL 渲染层
为了在应用中使用 OpenGL 函数,您应该获得一个 iOS 图形上下文表面,它将向用户呈现渲染的场景。 该上下文通常绑定到用户看到的视图。 以下屏幕快照显示了 XCode 的界面构建器中应用接口的层次结构:
为了封装 OpenGL 上下文初始化逻辑,我们引入EAGLView类:
@class EAGLContext;
// This class wraps the CAEAGLLayer from CoreAnimation into a convenient UIView subclass.
// The view content is basically an EAGL surface you render your OpenGL scene into.
// Note that setting the view non-opaque will only work if the EAGL surface has an alpha channel.
@interface EAGLView : UIView
{
@private
// The OpenGL ES names for the framebuffer and renderbuffer used to render
to this view.
GLuint defaultFramebuffer, colorRenderbuffer;
}
@property (nonatomic, retain) EAGLContext *context;
// The pixel dimensions of the CAEAGLLayer.
@property (readonly) GLint framebufferWidth;
@property (readonly) GLint framebufferHeight;
- (void)setFramebuffer;
- (BOOL)presentFramebuffer;
- (void)initContext;
@end
此类连接到接口定义文件中的视图,因此,在加载NIB文件时,运行时将实例化EAGLView的新实例。 创建后,它将接收来自 iOS 的事件并初始化 OpenGL 渲染上下文。
以下是显示initWithCoder函数的代码清单:
//The EAGL view is stored in the nib file. When it's unarchived it's sent -initWithCoder:.
- (id)initWithCoder:(NSCoder*)coder
{
self = [super initWithCoder:coder];
if (self) {
CAEAGLLayer *eaglLayer = (CAEAGLLayer *)self.layer;
eaglLayer.opaque = TRUE;
eaglLayer.drawableProperties = [NSDictionary dictionaryWithObjectsAndKeys:
[NSNumber numberWithBool:FALSE],
kEAGLDrawablePropertyRetainedBacking,
kEAGLColorFormatRGBA8,
kEAGLDrawablePropertyColorFormat,
nil];
[self initContext];
}
return self;
}
- (void)createFramebuffer
{
if (context && !defaultFramebuffer) {
[EAGLContext setCurrentContext:context];
// Create default framebuffer object.
glGenFramebuffers(1, &defaultFramebuffer);
glBindFramebuffer(GL_FRAMEBUFFER, defaultFramebuffer);
// Create color render buffer and allocate backing store.
glGenRenderbuffers(1, &colorRenderbuffer);
glBindRenderbuffer(GL_RENDERBUFFER, colorRenderbuffer);
[context renderbufferStorage:GL_RENDERBUFFER fromDrawable:(CAEAGLLayer *)self.layer];
glGetRenderbufferParameteriv(GL_RENDERBUFFER, GL_RENDERBUFFER_WIDTH, &framebufferWidth);
glGetRenderbufferParameteriv(GL_RENDERBUFFER, GL_RENDERBUFFER_HEIGHT, &framebufferHeight);
glFramebufferRenderbuffer(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT0,
GL_RENDERBUFFER, colorRenderbuffer);
if (glCheckFramebufferStatus(GL_FRAMEBUFFER) != GL_FRAMEBUFFER_COMPLETE)
NSLog(@"Failed to make complete framebuffer object %x",
glCheckFramebufferStatus(GL_FRAMEBUFFER));
//glClearColor(0, 0, 0, 0);
NSLog(@"Framebuffer created");
}
}
渲染 AR 场景
正如所见,EAGLView类不包含用于 3D 对象和视频可视化的方法。 这是有目的的。 EAGLView的任务是提供渲染上下文。 职责分离使我们以后可以更改可视化的逻辑。
为了可视化增强现实,我们将创建一个单独的类,称为VisualizationController:
@interface SimpleVisualizationController : NSObject<VisualizationController>
{
EAGLView * m_glview;
GLuint m_backgroundTextureId;
std::vector<Transformation> m_transformations;
CameraCalibration m_calibration;
CGSize m_frameSize;
}
-(id) initWithGLView:(EAGLView*)view calibration:(CameraCalibration) calibration frameSize:(CGSize) size;
-(void) drawFrame;
-(void) updateBackground:(BGRAVideoFrame) frame;
-(void) setTransformationList:(const std::vector<Transformation>&) transformations;
drawFrame函数将 AR 渲染到给定的EAGLView目标视图上。 它执行以下步骤:
- 清除场景。
- 设置正投影以绘制背景。
- 在视口上绘制从相机接收的最新图像。
- 根据相机的固有参数设置透视投影。
- 对于每个检测到的标记,它将坐标系移动到 3D 中的标记位置。 (它将
4 x 4转换矩阵放入 OpenGl 模型视图矩阵。) - 渲染任意 3D 对象。
- 显示帧缓冲区。
准备绘制框架时,将调用drawFrame函数。 当新的相机帧已上载到视频存储器并且标记检测阶段已完成时,就会发生这种情况。
以下代码显示drawFrame函数:
- (void)drawFrame
{
// Set the active framebuffer
[m_glview setFramebuffer];
// Draw a video on the background
[self drawBackground];
// Draw 3D objects on the position of the detected markers
[self drawAR];
// Present framebuffer
bool ok = [m_glview presentFramebuffer];
int glErCode = glGetError();
if (!ok || glErCode != GL_NO_ERROR)
{
std::cerr << "GL error detected. Error code:" << glErCode << std::endl;
}
}
绘制背景非常容易。 我们设置正交投影并使用当前帧中的图像绘制全屏纹理。 这是使用 GLES 1 API 进行此操作的代码清单:
- (void) drawBackground
{
GLfloat w = m_glview.bounds.size.width;
GLfloat h = m_glview.bounds.size.height;
const GLfloat squareVertices[] =
{
0, 0,
w, 0,
0, h,
w, h
};
static const GLfloat textureVertices[] =
{
1, 0,
1, 1,
0, 0,
0, 1
};
static const GLfloat proj[] =
{
0, -2.f/w, 0, 0,
-2.f/h, 0, 0, 0,
0, 0, 1, 0,
1, 1, 0, 1
};
glMatrixMode(GL_PROJECTION);
glLoadMatrixf(proj);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glDisable(GL_COLOR_MATERIAL);
glEnable(GL_TEXTURE_2D);
glBindTexture(GL_TEXTURE_2D, m_backgroundTextureId);
// Update attribute values.
glVertexPointer(2, GL_FLOAT, 0, squareVertices);
glEnableClientState(GL_VERTEX_ARRAY);
glTexCoordPointer(2, GL_FLOAT, 0, textureVertices);
glEnableClientState(GL_TEXTURE_COORD_ARRAY);
glColor4f(1,1,1,1);
glDrawArrays(GL_TRIANGLE_STRIP, 0, 4);
glDisableClientState(GL_VERTEX_ARRAY);
glDisableClientState(GL_TEXTURE_COORD_ARRAY);
glDisable(GL_TEXTURE_2D);
}
场景中人造对象的渲染有些棘手。 首先,我们必须针对相机固有(校准)矩阵调整 OpenGL 投影矩阵。 没有这一步,我们将有错误的透视图。 错误的视角会使人造物体看起来不自然,就好像它们在“空中飞舞”,而不是真实世界的一部分。 正确的视角对于任何增强现实应用都是必不可少的。
这是一个代码片段,可根据相机的内在函数创建一个 OpenGL 投影矩阵:
- (void)buildProjectionMatrix:(Matrix33)cameraMatrix: (int)screen_width: (int)screen_height: (Matrix44&) projectionMatrix
{
float near = 0.01; // Near clipping distance
float far = 100; // Far clipping distance
// Camera parameters
float f_x = cameraMatrix.data[0]; // Focal length in x axis
float f_y = cameraMatrix.data[4]; // Focal length in y axis (usually the
same?)
float c_x = cameraMatrix.data[2]; // Camera primary point x
float c_y = cameraMatrix.data[5]; // Camera primary point y
projectionMatrix.data[0] = - 2.0 * f_x / screen_width;
projectionMatrix.data[1] = 0.0;
projectionMatrix.data[2] = 0.0;
projectionMatrix.data[3] = 0.0;
projectionMatrix.data[4] = 0.0;
projectionMatrix.data[5] = 2.0 * f_y / screen_height;
projectionMatrix.data[6] = 0.0;
projectionMatrix.data[7] = 0.0;
projectionMatrix.data[8] = 2.0 * c_x / screen_width - 1.0;
projectionMatrix.data[9] = 2.0 * c_y / screen_height - 1.0;
projectionMatrix.data[10] = -( far+near ) / ( far - near );
projectionMatrix.data[11] = -1.0;
projectionMatrix.data[12] = 0.0;
projectionMatrix.data[13] = 0.0;
projectionMatrix.data[14] = -2.0 * far * near / ( far - near );
projectionMatrix.data[15] = 0.0;
}
在将这个矩阵加载到 OpenGL 管道后,该绘制一些对象了。 每个变换可以表示为4 x 4矩阵,并加载到 OpenGL 模型视图矩阵中。 这会将坐标系移动到世界坐标系中的标记位置。
例如,让我们在每个标记的顶部绘制一个坐标轴,以显示其在空间中的方向,并在整个标记上绘制一个带有梯度填充的矩形。 这种可视化将为我们提供可视反馈,表明我们的代码正在按预期工作。
以下是显示drawAR函数的代码段:
- (void) drawAR
{
Matrix44 projectionMatrix;
[self buildProjectionMatrix:m_calibration.getIntrinsic():m_frameSize.width
:m_frameSize.height :projectionMatrix];
glMatrixMode(GL_PROJECTION);
glLoadMatrixf(projectionMatrix.data);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glEnableClientState(GL_VERTEX_ARRAY);
glEnableClientState(GL_NORMAL_ARRAY);
glPushMatrix();
glLineWidth(3.0f);
float lineX[] = {0,0,0,1,0,0};
float lineY[] = {0,0,0,0,1,0};
float lineZ[] = {0,0,0,0,0,1};
const GLfloat squareVertices[] = {
-0.5f, -0.5f,
0.5f, -0.5f,
-0.5f, 0.5f,
0.5f, 0.5f,
};
const GLubyte squareColors[] = {
255, 255, 0, 255,
0, 255, 255, 255,
0, 0, 0, 0,
255, 0, 255, 255,
};
for (size_t transformationIndex=0;
transformationIndex<m_transformations.size(); transformationIndex++)
{
const Transformation& transformation =
m_transformations[transformationIndex];
Matrix44 glMatrix = transformation.getInverted().getMat44();
glLoadMatrixf(reinterpret_cast<const GLfloat*>(&glMatrix.data[0]));
// draw data
glVertexPointer(2, GL_FLOAT, 0, squareVertices);
glEnableClientState(GL_VERTEX_ARRAY);
glColorPointer(4, GL_UNSIGNED_BYTE, 0, squareColors);
glEnableClientState(GL_COLOR_ARRAY);
glDrawArrays(GL_TRIANGLE_STRIP, 0, 4);
glDisableClientState(GL_COLOR_ARRAY);
float scale = 0.5;
glScalef(scale, scale, scale);
glColor4f(1.0f, 0.0f, 0.0f, 1.0f);
glVertexPointer(3, GL_FLOAT, 0, lineX);
glDrawArrays(GL_LINES, 0, 2);
glColor4f(0.0f, 1.0f, 0.0f, 1.0f);
glVertexPointer(3, GL_FLOAT, 0, lineY);
glDrawArrays(GL_LINES, 0, 2);
glColor4f(0.0f, 0.0f, 1.0f, 1.0f);
glVertexPointer(3, GL_FLOAT, 0, lineZ);
glDrawArrays(GL_LINES, 0, 2);
}
glPopMatrix();
glDisableClientState(GL_VERTEX_ARRAY);
}
如果运行应用,则会得到下图:
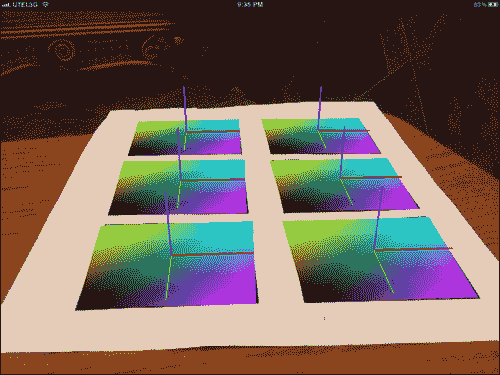
尽管的事实是我们没有使用特殊的 3D 渲染引擎进行场景可视化,但我们拥有所有必要的数据来自行完成此操作。 让我们总结一下我们获得的数据:
- 来自相机设备的 BGRA 格式的帧
- 正确的投影矩阵可以为我们提供适合 AR 场景渲染的透视投影
- 找到的标记姿势列表
您可以轻松地将此数据放入任何 3D 引擎,并创建自己的基于标记的成品 AR 应用
如您所见,具有梯度填充和枢轴的四边形正好放置在标记上。 这是增强现实的关键功能-真实图片和人造物体的无缝融合。
总结
在本章中,我们学习了如何为 iPhone/iPad 设备创建移动增强现实应用。 您了解了如何在 XCode 项目中使用 OpenCV 库来创建令人惊叹的最新应用。 使用 OpenCV 可使您的应用在移动设备上执行实时性能的复杂图像处理计算。
从本章中,您还学习了如何执行初始图像处理(以灰色阴影和二值化进行平移),如何在图像中找到闭合的轮廓并使用多边形对其进行近似,如何在图像中找到标记并对其进行解码,如何计算标记在空间中的位置,以及增强现实中 3D 对象的可视化。
参考
- 《ArUco:基于 OpenCV 的增强现实应用的最小库》
- 《OpenCV 摄像机校准和 3D 重建》
- 《OpenCV:估计图像中的投影关系》
- 《计算机视觉中的多视图几何(第二版)》,RI Hartley 和 A. Zisserman,剑桥大学出版社,ISBN 0-521-54051-8
